Download
1 / 15
150 likes | 221 Views
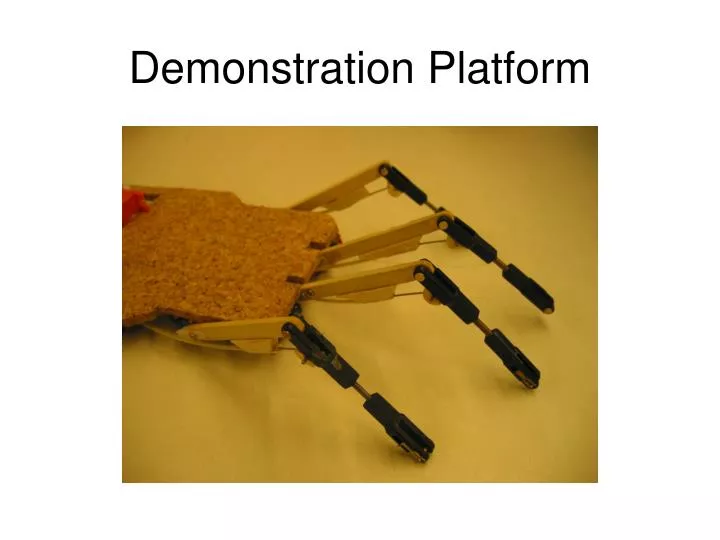
Demonstration Platform. Engaging-disengaging scheme. disengage. engage. High torque required?. Bending adhesion. PSA. compression. Tension. PSA toybot. Number of DOF- 10 Hip joint servo - 6 Main thrusting - 2 PSA –peeling – 2 Actuation scheme

E N D
Engaging-disengaging scheme disengage engage High torque required?
Bending adhesion PSA compression Tension
PSA toybot • Number of DOF- 10 Hip joint servo - 6 Main thrusting - 2 PSA –peeling – 2 • Actuation scheme – Servo driven push-pull cable • Gait type – alternating tripod • Weight - 200g
2 DOF legs -Key point : Flexible cable without sheath can not push hard Main power transmission - pulling 2DOF per leg Front leg (pull -> pull) Rear leg (pull -> push)
Servo motor PSA push-pull cable Main thrusting DOF push-pull cable
Engagement Disengagement PSA Push-pull cable Non-sticky pad
Problems.. • Actuator.. • Foot placement scheme • Leg position
Leg actuation • Actuator - Is servo motor the best selection? - What is muscle-like actuator? - How do we control compliance in power transmission path ?
Sensors. ? • Do we need sensor? • Body pitching, rolling.. • Foot attach detection • Optic sensor? Gyro? • What type of CPU do we need ?(Virgilio)
Leg interaction - How do we control Ground reaction force to maximize stability ? • Do we need force sensor on foot? • How do we accommodate difference among legs stroke?
Leg position • Alternating tripod?
Questions.. • What weight range is reasonable for Climbing robot? • What size ? • How do we optimize weight/ power ?