Download
1 / 1
50 likes | 259 Views
STEAM. Umesh Shankar, Naveen Sastry, David Wagner . NEST Retreat: UC Berkeley. Goals. Algorithms. Parent Switching Senders switch parents if their messages are not getting through for whatever reason . We don’t distinguish between connectivity problems, interference, or schedule conflicts.

E N D
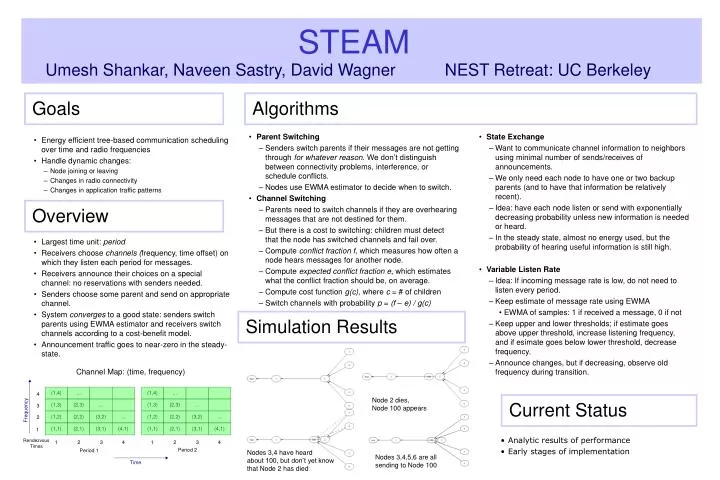
STEAM Umesh Shankar, Naveen Sastry, David Wagner NEST Retreat: UC Berkeley Goals Algorithms • Parent Switching • Senders switch parents if their messages are not getting through for whatever reason. We don’t distinguish between connectivity problems, interference, or schedule conflicts. • Nodes use EWMA estimator to decide when to switch. • Channel Switching • Parents need to switch channels if they are overhearing messages that are not destined for them. • But there is a cost to switching: children must detect that the node has switched channels and fail over. • Compute conflict fraction f, which measures how often a node hears messages for another node. • Compute expected conflict fraction e, which estimates what the conflict fraction should be, on average. • Compute cost function g(c), where c = # of children • Switch channels with probability p = (f – e) / g(c) • State Exchange • Want to communicate channel information to neighbors using minimal number of sends/receives of announcements. • We only need each node to have one or two backup parents (and to have that information be relatively recent). • Idea: have each node listen or send with exponentially decreasing probability unless new information is needed or heard. • In the steady state, almost no energy used, but the probability of hearing useful information is still high. • Variable Listen Rate • Idea: If incoming message rate is low, do not need to listen every period. • Keep estimate of message rate using EWMA • EWMA of samples: 1 if received a message, 0 if not • Keep upper and lower thresholds; if estimate goes above upper threshold, increase listening frequency, and if esimate goes below lower threshold, decrease frequency. • Announce changes, but if decreasing, observe old frequency during transition. • Energy efficient tree-based communication scheduling over time and radio frequencies • Handle dynamic changes: • Node joining or leaving • Changes in radio connectivity • Changes in application traffic patterns Overview • Largest time unit: period • Receivers choose channels (frequency, time offset) on which they listen each period for messages. • Receivers announce their choices on a special channel: no reservations with senders needed. • Senders choose some parent and send on appropriate channel. • System converges to a good state: senders switch parents using EWMA estimator and receivers switch channels according to a cost-benefit model. • Announcement traffic goes to near-zero in the steady-state. Simulation Results Channel Map: (time, frequency) Node 2 dies, Node 100 appears Current Status • Analytic results of performance • Early stages of implementation Nodes 3,4 have heard about 100, but don’t yet know that Node 2 has died Nodes 3,4,5,6 are all sending to Node 100