Download
1 / 1
20 likes | 274 Views
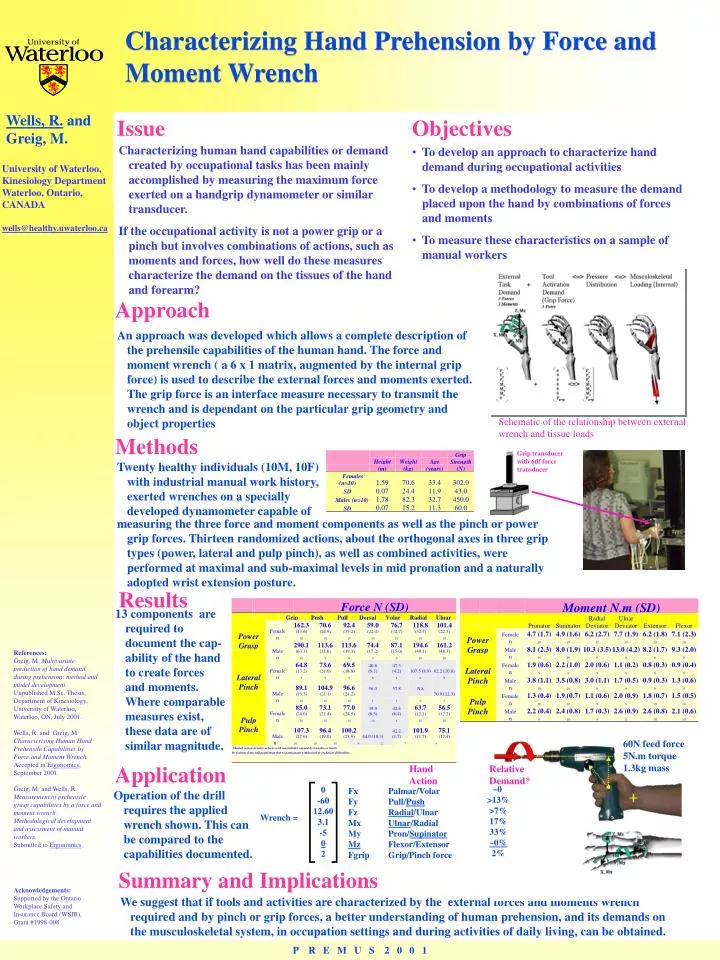
~0 >13% >7% 17% 33% ~0% 2%. Fx Palmar/Volar Fy Pull/ Push Fz Radial /Ulnar Mx Ulnar /Radial My Pron/ Supinator Mz Flexor/Extensor Fgrip Grip/Pinch force. Hand Relative Action Demand* . 0 -60 12.60 3.1 -5 0 2. Wrench =.

E N D
~0 >13% >7% 17% 33% ~0% 2% Fx Palmar/Volar Fy Pull/Push Fz Radial/Ulnar Mx Ulnar/Radial My Pron/Supinator Mz Flexor/Extensor Fgrip Grip/Pinch force Hand Relative Action Demand* 0 -60 12.60 3.1 -5 0 2 Wrench = Characterizing Hand Prehension by Force and Moment Wrench Wells, R.and Greig, M. Issue Objectives Characterizing human hand capabilities or demand created by occupational tasks has been mainly accomplished by measuring the maximum force exerted on a handgrip dynamometer or similar transducer. If the occupational activity is not a power grip or a pinch but involves combinations of actions, such as moments and forces, how well do these measures characterize the demand on the tissues of the hand and forearm? • To develop an approach to characterize hand demand during occupational activities • To develop a methodology to measure the demand placed upon the hand by combinations of forces and moments • To measure these characteristics on a sample of manual workers University of Waterloo, Kinesiology Department Waterloo, Ontario, CANADA wells@healthy.uwaterloo.ca Approach An approach was developed which allows a complete description of the prehensile capabilities of the human hand. The force and moment wrench ( a 6 x 1 matrix, augmented by the internal grip force) is used to describe the external forces and moments exerted. The grip force is an interface measure necessary to transmit the wrench and is dependant on the particular grip geometry and object properties Schematic of the relationship between external wrench and tissue loads Methods Grip transducer with 6df force transducer Twenty healthy individuals (10M, 10F) with industrial manual work history, exerted wrenches on a specially developed dynamometer capable of measuring the three force and moment components as well as the pinch or power grip forces. Thirteen randomized actions, about the orthogonal axes in three grip types (power, lateral and pulp pinch), as well as combined activities, were performed at maximal and sub-maximal levels in mid pronation and a naturally adopted wrist extension posture. Results 13 components are required to document the cap-ability of the hand to create forces and moments. Where comparable measures exist, these data are of similar magnitude. References: Greig, M. Multivariate prediction of hand demand during prehension: method and model development.Unpublished M.Sc. Thesis, Department of Kinesiology, University of Waterloo, Waterloo, ON, July 2001. Wells, R. and Greig, M. Characterising Human Hand Prehensile Capabilities by Force and Moment Wrench.Accepted in Ergonomics, September 2001. Greig, M. and Wells, R. Measurement of prehensile grasp capabilities by a force and moment wrench: Methodological development and assessment of manual workers. Submitted to Ergonomics. 60N feed force 5N.m torque 1.3kg mass Application Operation of the drill requires the applied wrench shown. This can be compared to the capabilities documented. Summary and Implications Acknowledgements: Supported by the Ontario Workplace Safety and Insurance Board (WSIB), Grant #1998-008 • We suggest that if tools and activities are characterized by the external forces and moments wrench required and by pinch or grip forces, a better understanding of human prehension, and its demands on the musculoskeletal system, in occupation settings and during activities of daily living, can be obtained. P R E M U S 2 0 0 1