Download
1 / 25
250 likes | 402 Views
Laser Tracking System (LTS). Team Lazer: Son Nguyen Jassim Alshamali Aja Armstrong Matt Aamold. Presentation Outline. Project Objectives LTS Sub-Systems and Division of Labor Xilinx Spartan-3 FPGA Highlights LTS Sub-Systems Goals Project Schedule Areas of Risk Social Impacts.

E N D
Laser Tracking System (LTS) Team Lazer: Son Nguyen Jassim Alshamali Aja Armstrong Matt Aamold
Presentation Outline • Project Objectives • LTS Sub-Systems and Division of Labor • Xilinx Spartan-3 FPGA Highlights • LTS Sub-Systems • Goals • Project Schedule • Areas of Risk • Social Impacts
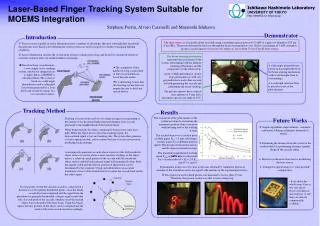
Project Objectives • To design and build a laser tracking system using an analog camera to follow and focus on a moving laser against a white (or other high contrast) background • To implement the tracking system to function in both static and dynamic modes • Static Mode • Camera focuses on a statically positioned laser for firing device • Dynamic Mode • Camera will follow a moving laser target • Target detection and servo control specifically through FPGA
LTS Sub-Systems and Division of Labor • Matt - Digitization • Jassim - Target detection/Coordinate System • Son – Control System • Aja – Coordinate System/Project Management
Xilinx FPGA Highlights • Easier glue logic implementation • 3 – 40 pin .1” expansion headers for I/O signals • 50Mhz clock • 10ns 1MB SRAM • 2Mb programmable configuration PROM • Easy implementation of serial interface for test/debug • Basic user controls and output (push buttons, 7 seg disp., etc) • Softcore processor capabilities (if needed) Spartan-3 Starter Kit
Digitization Sub-System • Parts Used • Sampling • Timing
Digitization - Parts • Digitization Parts List • FPGA board • 8-bit A/D Converter – AD775 • Video Sync Separator – LM1881 • 40 pin .1” right angle header from AMP connectors • 24 pin SOIC to DIP adapter for AD775 • Perf board connected through FPGA expansion ports for ADC, sync separator, and servo signals
Digitization - Sampling • AD775 8-bit high speed but low quality • Can sample 8-bit color or gray scale • Ultimate goal of color easier detection but low color quality
Sampling Quality Compare • 24-bit, target is very distinct
Sampling Quality Compare • 8-bit • Shades become really close in color to the target
Digitization - Timing • AD775: 20 MSPS • NTSC: 64 us per line • Maximum horizontal resolution: (64E-6) / (1/20E6) = 1280 • Actual resolution used projected at ~510 • Fixed vertical resolution based on specific camera • Frame synchronization and coordinate of target based on use of external Video Sync Separator IC (LM1881)
Control Sub-Systems • Servo Controls • Structure Design • Trigger Construction • Power Supply
Control System - Servo 2 HiTec HS-50 servos • Two high speed servo motors (X and Y axis movement) that mount camera and firing device • Specifications of Servo: • Deadband of 8us • Operates off of 4.8V-6V
Control System - Servo • Requires 3-5 Vpp square wave pulse • Pulse of .9ms-2.1ms with 1.5ms center • Refreshes at 50Hz
Control System - Structure • The structure of the project will be made of plexi-glass conformed to the needs of where the servos need to be placed. • Advantages of Plexi glass • Light weight • Durable • Can easily be cut to conform to structural needs
Control System - Trigger System • The use of a trigger system will demonstrate the effectiveness of the LTS • Solenoids will provide a mechanical mechanism to help propel a projectile at a given target
Control System - Power Supply • Power supply that can generate enough power from a 120V AC source to run the entire LTS project • DC Voltage • 1.5V • 3V • 5V • 12V
Camera • Features: • - 380 lines of resolution • - 0.1 Lux CCD imager • - Power: 9V to 12V DC, 110mA • - Dim: 1.2" x 1.2" x .3"- Weight: 1oz • - Lens: 3.7mm (78 deg) • CCD camera instead of CMOS • Better resolution
Target Detection/Coordinate System • The sample bits that are coming in are representing the color, the x-counter and the y-counter. • On a gray scale the numbers for the color will be between 0-255.
Goals • Minimum: Target detection through B/W feed based on gray scale contrast for Static Targeting Mode only • Base Goal: Target detection through color feed based on color differentiation for Static and Dynamic Mode Targeting; also implement firing device for Static Targeting Mode • Maximum: Design and implement path prediction for Extended Dynamic Mode
Areas of Risk • Finding an accurate link between the servos and the digitization (Coordinate System) • How far away we can mount the camera so that it will pick up the laser (Target Detection) • Implementing the FPGA for our overall system (Digitization to Servo Link)
Impacts on Society • Military Applications • Basic Turret Tracking system • Current military spending for 2005 is projected at $540 billion • Commercial Use • Possibly used for tracking individuals • Example: An escaping prisoner