Download
1 / 31
310 likes | 419 Views
Utility Optimization with “Super-Fast” Delay Tradeoffs in Wireless Networks. l. l 1. l L. Michael J. Neely University of Southern California http://www-rcf.usc.edu/~mjneely/ Comm Theory Workshop, Sedona, AZ, 2007. *Sponsored by NSF OCE Grant 0520324.

E N D
Utility Optimization with “Super-Fast” Delay Tradeoffs in Wireless Networks l l1 lL Michael J. Neely University of Southern California http://www-rcf.usc.edu/~mjneely/ Comm Theory Workshop, Sedona, AZ, 2007 *Sponsored by NSF OCE Grant 0520324
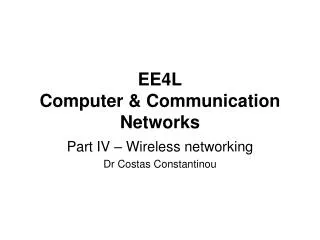
Simple One-Hop Network with L Time Varying Links: (example: Downlink, Uplink) S1(t) Cross-Layer Control: Flow Control Transmission scheduling/MAC resource Alloc. A1(t) S2(t) AL(t) SL(t) -Slotted time t = {0, 1, 2, …} t 0 1 2 3 … -Traffic vector A(t) = (A1(t), …, AL(t)) i.i.d. over timeslots. Rates E{A(t)} = (l1, …, lL)
Simple One-Hop Network with L Time Varying Links: (example: Downlink, Uplink) S1(t) Cross-Layer Control: Flow Control Transmission scheduling/MAC resource Alloc. A1(t) S2(t) AL(t) SL(t) Flow Control Decisions: Choose Ri(t) for each input i U1(t) = Queue Backlog R1(t) A1(t) R1(t) = New data admitted to link 1 on slot t
Simple One-Hop Network with L Time Varying Links: (example: Downlink, Uplink) S1(t) Cross-Layer Control: Flow Control Transmission scheduling/MAC resource alloc. A1(t) S2(t) AL(t) SL(t) -Channel State Vector S(t)=(S1(t), …, SL(t)) (Example: 2-state ON/OFF, 10000-state channel quality) -Control Input I(t)=(I1(t), … , IL(t)) , I(t) W (Example: Power Allocation, Server Scheduling, Frequency Band Allocation, etc.)
Simple One-Hop Network with L Time Varying Links: (example: Downlink, Uplink) S1(t) Cross-Layer Control: Flow Control Transmission scheduling/MAC resource alloc. A1(t) S2(t) AL(t) SL(t) -Channel State Vector S(t)=(S1(t), …, SL(t)) -Control Input I(t)=(I1(t), … , IL(t)) -Link Transmission Rate Function C(I(t), S(t)) “State a” m(t) = C(I(t), S(t)) = Transmission rates on slot t
Simple One-Hop Network with L Time Varying Links: (example: Downlink, Uplink) S1(t) Cross-Layer Control: Flow Control Transmission scheduling/MAC resource alloc. A1(t) S2(t) AL(t) SL(t) -Channel State Vector S(t)=(S1(t), …, SL(t)) -Control Input I(t)=(I1(t), … , IL(t)) -Link Transmission Rate Function C(I(t), S(t)) “State b” m(t) = C(I(t), S(t)) = Transmission rates on slot t
Simple One-Hop Network with L Time Varying Links: (example: Downlink, Uplink) S1(t) Cross-Layer Control: Flow Control Transmission scheduling/MAC resource alloc. A1(t) S2(t) AL(t) SL(t) -Channel State Vector S(t)=(S1(t), …, SL(t)) -Control Input I(t)=(I1(t), … , IL(t)) -Link Transmission Rate Function C(I(t), S(t)) “State c” m(t) = C(I(t), S(t)) = Transmission rates on slot t
m(t) = C(I(t), S(t)) Simple One-Hop Network with L Time Varying Links: (example: Downlink, Uplink) S1(t) Cross-Layer Control: Flow Control Transmission scheduling/MAC resource alloc. A1(t) S2(t) AL(t) SL(t) Transmission Scheduling/ MAC Resource Allocation Decisions: Every Slot, observe S(t), Choose I(t) W This determines
Definition: The Network Capacity Region L is the set of all long-term sustainable throughput vectors, considering all possible scheduling algs. (i.e., all ways to choose I(t) W ) l1 L lL Thruput vector = (r1, r2, …, rL) (Capacity region L is defined independently of arrivals)
l1 L lL Goal: Design a joint Flow-Control / Scheduling Algorithm that maximizes utility and achieves an optimal utility-delay tradeoff general concave utility functions of thruput L Maximize: gi(ri) Subject to: r L 0 < ri < li i=1
L Maximize: gi(ri) Subject to: r L 0 < ri < li i=1 Pop Quiz Question 1: How to design joint flow control And scheduling in case when l is inside L? l1 l lL Special Case Example: Server Scheduling: -1 server -Time varying rates -ON/OFF channels (one packet when ON)
L Maximize: gi(ri) Subject to: r L 0 < ri < li i=1 Answer: Flow control should let everything in. Resource Allocation: Max Ui(t) Ci(I(t), S(t)) i l1 l lL Queue Lengths are Important!Lyapunov Stability Theory…
A brief history of Lyapunov Drift for Queueing Systems: Lyapunov Stability: Tassiulas, Ephremides [91, 92, 93] P. R. Kumar, S. Meyn [95] McKeown, Anantharam, Walrand [96, 99] Kahale, P. E. Wright [97] Andrews, Kumaran, Ramanan, Stolyar, Whiting [2001] Leonardi, Mellia, Neri, Marsan [2001] Neely, Modiano, Rohrs [2002, 2003, 2005] Joint Stability with Utility Optimization was the Big Open Question until: Tsibonis, Georgiadis, Tassiulas [infocom 2003] (special structure net, linear utils) Neely, Modiano [thesis 2003, infocom 2005] (general nets and utils) Eryilmaz, Srikant [infocom 2005] (downlink, general utils) Stolyar [Queueing Systems 2005] (general nets and utils)
Comparison of previous algorithms: Tassiulas Alg. MWM (max Uimi) Borst Alg. [Borst Infocom 2003] (max mi/mi) Tse Alg. [Tse 97, 99, Kush 2002] (max mi/ri) Curves from [Neely, Modiano, Li, INFOCOM 2005]
Lyapunov drift for joint stability and performance optimization: Neely, Modiano [2003, 2005] (Fairness, Energy) Georgiadis, Neely, Tassiulas [NOW Publishers, F&T, 2006] Neely [Infocom 2006, JSAC 2006] (“Super-fast” delay tradeoffs) Alternate Approaches to Stoch. Performance Optimization: Tsibonis, Georgiadis, Tassiulas [2003] (special structure net, linear utils) Eryilmaz, Srikant [2005] (Fluid Model Transformations) Stolyar [2005] (Fluid Model Transformations) Lee, Mazumdar, Shroff [2005] (Stochastic Gradients) Lin, Shroff [2004] (Scheduling for static channels)
Lyapunov drift for joint stability and performance optimization: Neely, Modiano [2003, 2005] (Fairness, Energy) Georgiadis, Neely, Tassiulas [NOW Publishers, F&T, 2006] Neely [Infocom 2006, JSAC 2006] (“Super-fast” delay tradeoffs) Alternate Approaches to Stoch. Performance Optimization: Tsibonis, Georgiadis, Tassiulas [2003] (special structure net, linear utils) Eryilmaz, Srikant [2005] (Fluid Model Transformations) Stolyar [2005] (Fluid Model Transformations) Lee, Mazumdar, Shroff [2005] (Stochastic Gradients) Lin, Shroff [2004] (Scheduling for static channels) Yields Explicit Delay Tradeoff Results!
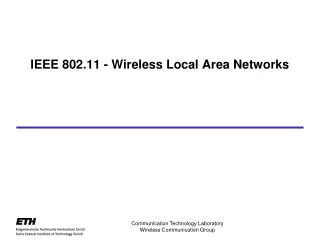
wired network wireless sensor network 5 0 1 8 6 9 2 l91 l93 3 4 7 l48 l42 Rn(c)(t) ln(c) Un(c)(t) l1 l2 Pop Quiz Question 2: How to design joint flow control and scheduling in case when l is outsideL? A general multi-hop Heterogeneous network. [O(1/V), O(V)] utility-delay Tradeoffs from: [Neely, Modiano, Li INFOCOM 2005]
wired network wireless sensor network 5 0 1 8 6 9 2 l91 l93 3 4 7 l48 l42 Rn(c)(t) ln(c) Un(c)(t) Pop Quiz Question 2: How to design joint flow control and scheduling in case when l is outsideL? A general multi-hop Heterogeneous network. [O(1/V), O(V)] utility-delay Tradeoffs from: [Neely, Modiano, Li INFOCOM 2005] l1 Av. Delay l2 shrinking radius
wired network wireless sensor network 5 0 1 8 6 9 2 l91 l93 3 4 7 l48 l42 Rn(c)(t) ln(c) Un(c)(t) Pop Quiz Question 2: How to design joint flow control and scheduling in case when l is outsideL? A general multi-hop Heterogeneous network. [O(1/V), O(V)] utility-delay Tradeoffs from: [Neely, Modiano, Li INFOCOM 2005] l1 Av. Delay l2 shrinking radius
wired network wireless sensor network 5 0 1 8 6 9 2 l91 l93 3 4 7 l48 l42 Rn(c)(t) ln(c) Un(c)(t) Pop Quiz Question 2: How to design joint flow control and scheduling in case when l is outsideL? A general multi-hop Heterogeneous network. [O(1/V), O(V)] utility-delay Tradeoffs from: [Neely, Modiano, Li INFOCOM 2005] l1 Av. Delay l2 shrinking radius
wired network wireless sensor network 5 0 1 8 6 9 2 l91 l93 3 4 7 l48 l42 Rn(c)(t) ln(c) Un(c)(t) Pop Quiz Question 2: How to design joint flow control and scheduling in case when l is outsideL? A general multi-hop Heterogeneous network. [O(1/V), O(V)] utility-delay Tradeoffs from: [Neely, Modiano, Li INFOCOM 2005] l1 Av. Delay l2 shrinking radius
wired network wireless sensor network 5 0 1 8 6 9 2 l91 l93 3 4 7 l48 l42 Rn(c)(t) ln(c) Un(c)(t) Pop Quiz Question 2: How to design joint flow control and scheduling in case when l is outsideL? A general multi-hop Heterogeneous network. [O(1/V), O(V)] utility-delay Tradeoffs from: [Neely, Modiano, Li INFOCOM 2005] l1 Av. Delay l2 shrinking radius
wired network wireless sensor network 5 0 1 8 6 9 2 l91 l93 3 4 7 l48 l42 Rn(c)(t) ln(c) Un(c)(t) Pop Quiz Question 2: How to design joint flow control and scheduling in case when l is outsideL? A general multi-hop Heterogeneous network. [O(1/V), O(V)] utility-delay Tradeoffs from: [Neely, Modiano, Li INFOCOM 2005] l1 Av. Delay l2 shrinking radius
Question: Is [O(1/V), O(V)] the optimal utility-delay tradeoff? Results: For a large class of overloaded networks, we can do much better by achieving O(log(V)) average delay. l O(log(V)) Avg. Delay e e V [Neely Infocom 2006, JSAC 2006]
Question: Is [O(1/V), O(V)] the optimal utility-delay tradeoff? Results: For a large class of overloaded networks, we can do much better by achieving O(log(V)) average delay. l O(log(V)) Avg. Delay e e V [Neely Infocom 2006, JSAC 2006]
Question: Is [O(1/V), O(V)] the optimal utility-delay tradeoff? Results: For a large class of overloaded networks, we can do much better by achieving O(log(V)) average delay. l O(log(V)) Avg. Delay e e V [Neely Infocom 2006, JSAC 2006]
Question: Is [O(1/V), O(V)] the optimal utility-delay tradeoff? Results: For a large class of overloaded networks, we can do much better by achieving O(log(V)) average delay. l O(log(V)) Avg. Delay e e V [Neely Infocom 2006, JSAC 2006]
Question: Is [O(1/V), O(V)] the optimal utility-delay tradeoff? Results: For a large class of overloaded networks, we can do much better by achieving O(log(V)) average delay. l O(log(V)) Avg. Delay e e V [Neely Infocom 2006, JSAC 2006]
Question: Is [O(1/V), O(V)] the optimal utility-delay tradeoff? Results: For a large class of overloaded networks, we can do much better by achieving O(log(V)) average delay. l O(log(V)) Avg. Delay e e V [Neely Infocom 2006, JSAC 2006]
l1 l2 Theorem [Neely JSAC 2006]: For one-hop networks: Under i.i.d. random traffic and immediate admit/reject flow control decisions, no joint flow-control and scheduling algorithm can do better than a [O(1/V), O(log(V))] utility-delay tradeoff. (b) Under overloaded assumptions, algorithm UDOA (Utility-Delay Optimal Algorithm) achieves the [O(1/V), O(log(V))] tradeoff! What is the Algorithm UDOA?
What is the algorithm UDOA? See slides and JSAC 2006 paper on following links: Paper: M. J. Neely, “Super-Fast Delay Tradeoffs for Utility Optimal Fair Scheduling in Wireless Networks,” IEEE Journal on Selected Areas of Communications (JSAC), Special Issue on Nonlinear Optimization of Communication Systems, vol. 24, no. 8, pp. 1489-1501, Aug. 2006. http://www-rcf.usc.edu/~mjneely/pdf_papers/super-fast-jsac.pdf Slides: (from INFOCOM 2006) http://www-rcf.usc.edu/~mjneely/pdf_papers/super-fast-flow-control.ppt