Download
1 / 37
370 likes | 382 Views
This paper presents a sub-exponential randomized algorithm for solving the linear programming problem, improving the efficiency of previous algorithms. The algorithm combines Matoušek and Kalai's sub-exponential bounds with Clarkson's algorithms.

E N D
Sub Exponential Randomize Algorithm for Linear Programming Paper by: Bernd Gärtner and Emo Welzl Presentation by : Oz Lavee
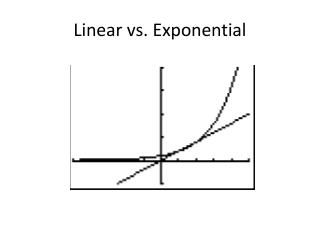
Linear programming • The linear programming problem is a well known problem in computational geometry • The last decade brought a progress in the efficiency of the linear programming algorithms • Most of the algorithms were exponential in the dimension of the problem
Linear programming • The last progress is a randomized algorithm that solve linear programming problem with n inequalities and d variables (Rd ) in expected time of: This algorithm that we will see is a combination of Matoušek and Kalai sub exponential bounds and Clarkson algorithms
Definition : Linear programming problem • Find a non negative vector x Rd that minimize cTx subject to n linear inequalities Ax b where x 0 • C – d-vector represent direction • X – d-vector • A[n,d] – n inequalities over d variables
Example over R2 h1 X h2 C h1,h2 - inequalities
Definitions • let H be the set of n half spaces defined by Ax b • Let H+be the set of d halfspaces defined by X0 • For a G H H+we definevG as the lexicographically minimal point x minimizing • cTx over hG h
Definitions : basis • A set of halfspacesBH H+is called a basis • if ,.vB is finite and for any subsetB’ of B • vB’<vB • A basis of G is a minimal subset B G such that • vB = vG
Definitions : violations • a constraint h H H+is violated by G if and only if vG < vG {h} • h is violated by vG ifh is violated by G G= {h1,h3} h = h2 h1 h2 vG h3
Definitions : extreme • a constraint h Gis extreme in G if vG-{h} < vG h1 G = {h1,h2,h3} h2 is extreme vG h2 h3
Lemma 1 1. For F G H H+, vF < vG 2. vF,vGare finite andvF = vG . h is violated by F if and only if h is violated by G. 3. If vG is finite then any basis of G has exactly d constraints , and G has at the most d extreme constraints
The algorithm • Our algorithm is a combination of 3 algorithms that use each other: 1. Clarkson first algorithm (CL1) for n>>d 2. Clarkson second algorithm (CL2) for 3. Subexponenial algorithm(subex) for 6d2 CL1 n>>d CL2 subex 6d2
Clarkson First Algorithm (CL1) • set H of n constraints where n>>d • We choose a random sample R H of size ,compute vR and the set V of constraints from H that are violated by vR • If V is not too large we add it to initially set G = H+ , choose another sample R and compute VR G and so on…
Clarkson First Algorithm (CL1) • CL1 (H) if n < 9d2 then return CL2(H) else r = , G = H+ repeat choose random v = CL2 (R) V = {h H | v violate h} if then G = GV until V = Ø return v
Two important facts Fact 1: • The expected size of V is no more than • The probability that |V| > is at the most The number of attempts to get a small enough V expected to be at the most 2
Three important fact Fact 2: • If any constraint is violated by v = vGR then for any basis B of H there must be a constraint that is violated by v. • The number of expansion of G is at the most d
CL1 Run time • CL1 compute vH H+ with expected o(d2n) operations and at the most 2d calls to CL2 with constraints
Clarkson Second Algorithm CL2 • This algorithm is very similar to the CL1 with the main different that instead of forcing V to be in the next iteration We increase the probability of the elements in v to be chosen for R in the next iteration
Clarkson Second Algorithm CL2 • We will use factor µ for each constraint that will be initialized to 1 . • For any constraint in V we will double his factor • For any basis B the elements of B increase so quickly that after a logarithmic time they will be chosen with high probability
Clarkson Second Algorithm CL2 • CL2 (H) if n 6d2 then return subex(H) else r = 6d2 repeat choose random v = subex (R) V = {h H | v violate h} if then for all h V do µh = 2µh until V = Ø return v
Lemma 4 • Let k be a positive integer then after kd Successful Iterations we have For any basis B of H
Run time CL2 • Since and since 2 > e1/3 after big enough k 2k > nek/3 • let k = 3ln(n) 2 k = n3ln2 > n2 = ne3ln(n)/3 • There will be at the most 3dln(n) successful iterations • There will be at the most 6dln(n) iterations
Run time CL2 • In each iteration there are O(dn) arithmetic operations and one call to subex • Totally O(d2nlogn) operations and 6dln(n) calls to subex
The Sub Exponential Algorithm (SUBEX) • The idea : • H a group of n constraints . • Remove a random constraint h • Compute recursively vH-{h} • If h is not violated then done. • Else try again by removing (hopefully different) constraint • The probability that h is violated is d/n
The Subex Algorithm • In order to get efficiency we will pass to the subex procedure in addition to the set G of constraints a candidate basis • We assume that we have the following primitive procedures: • Basis(B,h) : calculate the basis of B {h} • Violation test • Calculate VB of basis B
The Subex Algorithm Subex(G,B) if G=B return (VB,B) else choose random hG-B (v,B’) = Subex(G- {h},B) if h violates v return Subex(G,basis(B’,h)) else return (v,B’)
The Subex Algorithm • The number of steps is finite since: • The first recursive call decrease the number of constraints • The second recursive call increase the value of the temporal solution • Inductively it can be shown that the step keeps the correctness of the temporal solution
The Subex Algorithm Run Time • The subex algorithm is computing vH H+ with • We called the subex algorithm with 6d2 constraints so the run time for each call to subex is
Total Run Time • The runtime of cl2 = O(d2nlogn + 6dln(n)Tsubex(6d2) = • The runtime of cl1 =
The Abstract Framework • We can expand this algorithm to be used on larger range of problems. • Let H be a finite set • let (W{-},) linear ordered set of values • Let w : 2H W{-} value function
The Abstract Framework • Our goal : to find a minimal subset BH where w(B) = w(H) • We can use the algorithm that we saw in order to solve this problem if 2 axiom are satisfied.
The axioms • For any F ,G such that FG H we have w(F)w(G) .(monotonicity) • For any FG H with w(F) = w(G) if hH w(G) < w(G {h}) than w(F) < w(F {h})
LP-type problems • If those axioms hold for a definition of a problem we will call it LP-type problem • From lemma 1 we can see that the linear programming problem is LP-type.
LP-type problems • For the efficiency of the algorithm we need one more parameter for (H,w): the maximum size of any basis of H which is referred to as the combinatorial dimension of (H,w) denote as
LP-type problems • Any LP-type problem can be solved using the above algorithm but it is not necessarily be in sub exponential time • In order to have sub exponential time the problem should have the property of basis regularity • Basis regularity – all the basis has exactly constraints
LP-type problems - Examples • Smallest closing ball- given a set of n points in Rd find the smallest closing ball (combinatorial dimension- d+1) • Polytope distance – given two polytopes P,Q. compute pP q Q minimizing dist (p,q) (combinatorial dimension- d+2)
Summery • We have seen a randomized sub exponential in d-space algorithm for the linear programming problem • We have seen the family of LP-type problems
References • Linear-programming – Randomization and abstract frame work / Bernd Gärtner and Emo welzl