Download
1 / 34
340 likes | 511 Views
Perceptual Learning, Roving and the Unsupervised Bias. By Aaron Clarke, Henning Sprekeler, Wolfram Gerstner and Michael Herzog Brain Mind Institute École Polytechnique Féd é rale De Lausanne Switzerland. Talk Outline. Perceptual Learning & Roving The Unsupervised Bias

E N D
Perceptual Learning, Roving and the Unsupervised Bias By Aaron Clarke, Henning Sprekeler, Wolfram Gerstner and Michael Herzog Brain Mind Institute ÉcolePolytechniqueFédérale De Lausanne Switzerland
Talk Outline • Perceptual Learning & Roving • The Unsupervised Bias • Critical Experiment
Perceptual Learning 4.5 4 3.5 3 2.5 d' 2 1.5 1 0.5 0 0 5 10 15 20 25 30 35 40 45 50 Block Number
Talk Outline • Perceptual Learning & Roving • The Unsupervised Bias • Critical Experiment
Roving Learning Task 1 1200” 1200” 4.5 4 3.5 3 2.5 d' 2 1.5 1 0.5 0 0 5 10 15 20 25 30 35 40 45 50 Block Number
Roving Learning Task 1 Learning Task 2 1200” 1800” 1200” 1800”
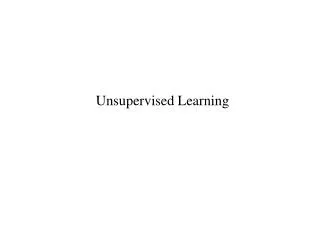
Roving Non-Roved Roved 4 4 1200" 1800" 3.5 3.5 3 3 2.5 2.5 d' d' 2 2 1.5 1.5 1 1 0.5 0.5 20 25 0 5 10 15 20 25 0 5 10 15 Block Number Block Number Adapted from Tartaglia, Bamert, Mast & H. Herzog (2009)
Hypotheses • Roving may disrupt memory-trace-buildup for the roved stimuli (Yu et al., 2004). • Roving may diminish the stimuli’s predictability (Adini et al., 2004). • Roving may prevent the participants from conceptually tagging each stimulus type in order to switch their attention to the appropriate perceptual template (Zhang et al., 2008).
Roving Learning Task 1 Learning Task 2 1200” 1800” 1200” 1800”
Hypotheses • Roving may disrupt memory-trace-buildup for the roved stimuli (Yu et al., 2004). • Roving may diminish the stimuli’s predictability (Adini et al., 2004). • Roving may prevent the participants from conceptually tagging each stimulus type in order to switch their attention to the appropriate perceptual template (Zhang et al., 2008).
Talk Outline • Perceptual Learning & Roving • The Unsupervised Bias • Critical Experiment
Talk Outline • Perceptual Learning & Roving • The Unsupervised Bias • Critical Experiment
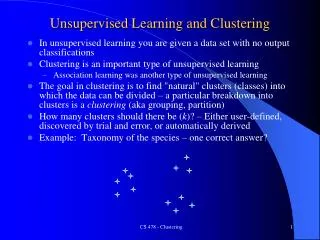
Model Predictions Unsupervised Supervised Reward-Based Δwij = prei ×postj Δwij = prei ×eij Δwij = Cov(R,wij) + ‹R› ‹wij› Desired Output Desired Output Output Output Error Error j i Reward Input Input Input • No feedback • Trial by trial feedback • Error feedback • Teacher signal • Feedback after many trials • Error feedback • Teacher signal
Model Predictions Unsupervised Supervised Reward-Based Δwij = prei ×postj Δwij = prei ×eij Δwij = Cov(R,wij) + ‹R› ‹wij› Desired Output Desired Output Output Output Feedback improves performance. Learning is possible without feedback Error Error j i Reward Input Input • No feedback • Trial by trial feedback • Error feedback • Teacher signal • Feedback after many trials • Error feedback • Teacher signal Herzog & Fahle (1998)
Reward-Based Learning Δwij = Cov(R,wij) + ‹R› ‹wij› Reward & current activations Averages of past trials weight change Covariation between reward weight change Average reward
Reward-Based Learning Δwij = Cov(R,wij) + ‹R› ‹wij› Reward & current activations Averages of past trials weight change = 0 Covariation between reward weight change Average reward
Reward-Based Learning Δwij = Cov(R1+R2,wij) + ‹R1+R2› ‹wij› Reward & current activations Averages of past trials weight change Covariation between reward weight change Average reward • Learning is impossible with two stimuli.
Roving Non-Roved Roved 4 4 1200" 1800" 3.5 3.5 3 3 2.5 2.5 d' d' 2 2 1.5 1.5 1 1 0.5 0.5 20 25 0 5 10 15 20 25 0 5 10 15 Block Number Block Number Adapted from Tartaglia, Bamert, Mast & H. Herzog (2009)
Talk Outline • Perceptual Learning & Roving • The Unsupervised Bias • Critical Experiment
Hypothesis • Roving impairs perceptual learning when the average reward for the two learned stimuli differs significantly. • This kind of situation occurs when the two roved tasks differ in their difficulty levels.
Roving Learning Task 1 Learning Task 2 1200” 1200” 1800” 1800”
Results H0: Mean Hard Slopes = 0: t(7) = -1.115, p = 0.151 4.5 1200” Easy Hard 4 3.5 3 2.5 d' H0: Mean Easy Slopes = 0: t(7) = -0.222, p = 0.415 2 1.5 1800” 1 0.5 0 0 5 10 15 20 Block Number
Results 4.5 4.5 Easy H0: Mean Non-Roved Slopes = 0: t(7) = 2.144, p = 0.035 Hard 4 4 3.5 3.5 3 3 2.5 2.5 d' d' 2 2 1.5 1.5 1 1 0.5 0.5 0 0 0 5 10 15 20 0 5 10 15 20 Block Number Block Number
Summary • There are three types of learning models: supervised, unsupervised and reward-based. • Only reward-based learning withstands empirical falsification, and it suffers from the unsupervised bias. • When roving two tasks, easy and hard, learning fails, as can be shown mathematically. And that is why roving occurs empirically. • A strange prediction from this is that roving a hard and a very easy task should deteriorate performance. Roving two hard tasks might make learning easier than roving a hard and an easy task, and this has actually been shown in other studies.
When is Learning During Roving Successful? Vs. Vs. Vs. 150 ms 500 ms
Experiment • Used two stimuli: 1800” and 1200”. • Measured pre-training thresholds for both stimuli in isolation. • Trained subjects with fixed offsets (easy = 1.5 × pre-training threshold, hard = 0.9 × pre-training threshold). • In 20 blocks of 80 trials. • Roved stimuli. Easy 1200” Easy 1800” Hard 1200”
Other Hypotheses • Roving may interact with the participants’ initial performance levels where worse initial performers learn more than high initial performers. • Roving might cause low-level interference between stimulus types (Tartaglia et al., 2009; Zhaoping, Herzog, & Dayan, 2003).