Download
1 / 47
470 likes | 502 Views
This lecture covers the properties of determinants, introduction to eigenvalues, applications of determinants, vectors in Rn, and vector spaces in elementary linear algebra. Topics include eigenvalue problem, characteristic equation, eigenvectors, adjoint matrix, Cramer’s Rule, and applications of determinants. Learn about matrix products, scalar multiples, singular and nonsingular matrices, and matrix inverses. Discover how to find eigenvalues and eigenvectors, solve systems of linear equations, and explore properties of determinants.

E N D
Lecture 6 Eigenvalue and Vector Space Lat Time - Evaluation of Determinants - Geometric Interpretations - Properties of Determinants Elementary Linear Algebra R. Larsen et al. (6th Edition) TKUEE翁慶昌-NTUEE SCC_10_2008
Lecture 6: Eigenvalue and Vectors Today • Properties of Determinants • Introduction to Eigenvalues • Applications of Determinants • Vectors in Rn • Vector Spaces Reading Assignment: Secs 3.4 – 3.5, 4.1-4.2 of Textbook Homework #3 due Next Time • Subspaces of Vector Spaces • Spanning Sets and Linear Independence • Basis and Dimension • Rank of a Matrix and Systems of Linear Equations Reading Assignment: Secs 4.3- 4.6 Homework #4 due
Lecture 6: Elementary Matrices & Determinants Today • Properties of Determinants (Cont.) • Introduction to Eigenvalues • Applications of Determinants • Vectors in Rn
3.3 Properties of Determinants • Notes: • Thm 3.5: (Determinant of a matrix product) det (AB) = det (A) det (B) (1) det (EA) = det (E) det (A) (2) (3)
Ex 1: (The determinant of a matrix product) Find |A|, |B|, and |AB| Sol:
Check: |AB| = |A| |B|
Ex 2: • Thm 3.6: (Determinant of a scalar multiple of a matrix) If A is an n × n matrix and c is a scalar, then det (cA) = cn det (A) Find |A|. Sol:
Thm 3.7: (Determinant of an invertible matrix) • Ex 3: (Classifying square matrices as singular or nonsingular) A square matrix A is invertible (nonsingular) if and only if det (A) 0 Sol: A has no inverse (it is singular). B has inverse (it is nonsingular).
Ex 4: • Thm 3.8: (Determinant of an inverse matrix) • Thm 3.9: (Determinant of a transpose) (a) (b) Sol:
If A is an n × n matrix, then the following statements are equivalent. • Equivalent conditions for a nonsingular matrix: (1) A is invertible. (2) Ax = b has a unique solution for every n × 1 matrix b. (3) Ax = 0 has only the trivial solution. (4) A is row-equivalent to In (5) A can be written as the product of elementary matrices. (6) det (A) 0
Ex 5: Which of the following system has a unique solution? (a) (b)
Sol: (a) This system does not have a unique solution. (b) This system has a unique solution.
Lecture 6: Elementary Matrices & Determinants Today Properties of Determinants (Cont.) Introduction to Eigenvalues Applications of Determinants Vectors in Rn Vector Spaces 6 - 15
Eigenvalue and eigenvector: A:an nn matrix :a scalar x: a n1nonzero column matrix Eigenvalue Eigenvector (The fundamental equation for the eigenvalue problem) 3.4 Introduction to Eigenvalues • Eigenvalue problem: If A is an nn matrix, do there exist n1 nonzero matrices x such that Ax is a scalar multiple of x?
Eigenvalue Eigenvalue Eigenvector Eigenvector • Ex 1: (Verifying eigenvalues and eigenvectors)
Note: (homogeneous system) If has nonzero solutions iff . • Characteristic equation of AMnn: • Question: Given an nn matrix A, how can you find the eigenvalues and corresponding eigenvectors?
Sol: Characteristic equation: Eigenvalue: • Ex 2: (Finding eigenvalues and eigenvectors)
Ex 3: (Finding eigenvalues and eigenvectors) Sol: Characteristic equation:
3.5 Applications of Determinants • Matrix of cofactors of A: • Adjoint matrix of A:
Thm 3.10: (The inverse of a matrix given by its adjoint) If A is an n × n invertible matrix, then • Ex:
Ex 2: (a) Find the adjoint of A. (b) Use the adjoint of A to find Sol:
adjoint matrix of A inverse matrix of A • Check: cofactor matrix of A
Thm 3.11: (Cramer’s Rule) (this system has a unique solution)
( i.e. )
Pf: A x = b,
Ex 6: Use Cramer’s rule to solve the system of linear equations. Sol:
Keywords in Section 3.5: • matrix of cofactors : 餘因子矩陣 • adjoint matrix : 伴隨矩陣 • Cramer’s rule : Cramer 法則
Lecture 6: Elementary Matrices & Determinants Today Properties of Determinants (Cont.) Introduction to Eigenvalues Applications of Determinants Vectors in Rn Vector Spaces 6 - 36
Chapter 4 Vector Spaces 4.1 Vectors in Rn 4.2 Vector Spaces 4.3 Subspaces of Vector Spaces 4.4 Spanning Sets and Linear Independence 4.5 Basis and Dimension 4.6 Rank of a Matrix and Systems of Linear Equations 4.7 Coordinates and Change of Basis
n-space: Rn the set of all ordered n-tuple 4.1 Vectors in Rn • An ordered n-tuple: a sequence of n real number
n = 1 R1 = 1-space = set of all real number n = 2 R2 = 2-space = set of all ordered pair of real numbers n = 3 R3 = 3-space = set of all ordered triple of real numbers n = 4 R4 = 4-space = set of all ordered quadruple of real numbers • Ex:
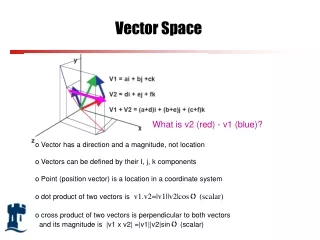
a point a vector • Notes: (1) An n-tuple can be viewed as a point in Rn with the xi’s as its coordinates. (2) An n-tuple can be viewed as a vector in Rnwith the xi’s as its components. • Ex:
(two vectors in Rn) • Equal: • if and only if • Vector addition (the sum of u and v): • Scalar multiplication (the scalar multiple of u by c): • Notes: The sum of two vectors and the scalar multiple of a vector in Rn are called the standard operations in Rn.
Difference: • Zero vector: • Notes: (1) The zero vector 0 in Rn is called the additive identity in Rn. (2) The vector –v is called the additive inverse of v. • Negative:
(1) u+v is a vector inRn (2) u+v = v+u (3) (u+v)+w = u+(v+w) (4) u+0 = u (5) u+(–u) = 0 (6) cu is a vector inRn (7) c(u+v) = cu+cv (8) (c+d)u = cu+du (9) c(du) = (cd)u (10) 1(u) = u • Thm 4.2: (Properties of vector addition and scalar multiplication) Let u, v, and w be vectors inRn , and let c and d be scalars.
Ex 5: (Vector operations in R4) Let u=(2, – 1, 5, 0), v=(4, 3, 1, – 1), and w=(– 6, 2, 0, 3) be vectors in R4. Solve x for x in each of the following. (a) x = 2u– (v + 3w) (b) 3(x+w) = 2u –v+x Sol: (a)
(1) The additive identity is unique. That is, if u+v=v, then u = 0 (2) The additive inverse of v is unique. That is, if v+u=0, then u = –v (3) 0v=0 (4) c0=0 (5) If cv=0, then c=0 or v=0 (6) –(–v) = v • Thm 4.3: (Properties of additive identity and additive inverse) Let v be a vector inRn and c be a scalar. Then the following is true.
Ex 6: Given x = (– 1, – 2, – 2), u = (0,1,4), v = (– 1,1,2), and w = (3,1,2) in R3, find a, b, and c such that x = au+bv+cw. Sol: • Linear combination: The vector x is called a linear combination of , if it can be expressed in the form