Download
1 / 10
100 likes | 151 Views
To improve robotic limb identification, internal sensors are utilized in this study with a focus on inertial parameters estimation. The arms, legs, and joints of the robot are precisely analyzed, allowing for accurate pose determination.

E N D
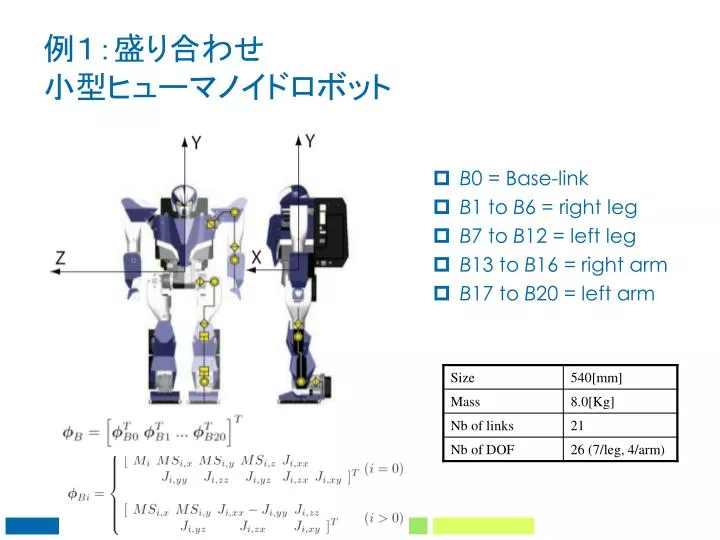
B0 = Base-link B1 to B6 = right leg B7 to B12 = left leg B13 to B16 = right arm B17 to B20 = left arm 例1:盛り合わせ小型ヒューマノイドロボット
例1:盛り合わせ小型ヒューマノイドロボット例1:盛り合わせ小型ヒューマノイドロボット • Arms of small dimensions • Associated inertial parameters small and difficult to estimate with respect to the sensors resolution • To avoid this lack of information: • upper limbs fixed in a pose • Links B13 to B20 attached to based-link B0 • 94 base parameters to identify
例2:内界センサー大型ヒューマノイドロボット例2:内界センサー大型ヒューマノイドロボット 30 自由度
内界センサ • ジャイロ • エンコーダ • 足首力センサ +フィルタリング
全リンクの同定 • 9種類の動作 • 足踏み • 歩く (前向き) • 歩く (後ろ向き) • 4 「Conductor Like Motion」(2A2) ⇒ 同定には3つの動作を選んだ
実験結果 -検証結果 Walk motion Wfwd1 Conductor Like CL1 Obtained from the force sensors ΣJk1Fk Obtained from identified data Y B1ϕB Obtained from CAD data Y B1ϕBCAD
