Download
1 / 14
150 likes | 317 Views
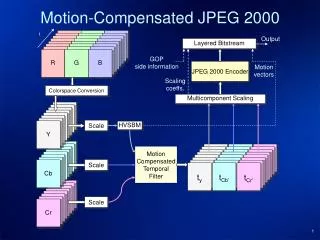
Affine Motion-compensated Prediction. Dragomir Anguelov EE368B Final Project December 8, 2000. Motivation. Motion models used for prediction Translation How about more complex motions: rotation, shear? Tradeoff – increased expressivity vs. increased number of parameters. Motion Models.

E N D
Affine Motion-compensated Prediction Dragomir Anguelov EE368B Final Project December 8, 2000
Motivation • Motion models used for prediction • Translation • How about more complex motions: rotation, shear? • Tradeoff – increased expressivity vs. increased number of parameters
Motion Models • Translation – 2 parameters • Affine – additional 4 parameters • Account for rotation and shear
The Motion-compensated Hybrid Coder • Testbed assumptions: • Want very good image reconstruction • Details • Subpixel accuracy • No filtering • DCT Entropy-Minimizing coder with uniform quantization • Error image encoded and transmitted
Affine Motion Estimation Overview • Blockmatching techniques • Infeasible, search space in 6 dimensions, optimizations in this space not well studied • Differential techniques • Lucas-Kanade pyramidal tracker (used in this project) [Lucas, Kanade ’81] [Shi, Tomasi, ’94] • Mixture techniques
Lucas-Kanade tracker • Minimizes • Newton-Raphson minimization using the derivatives of the error function • Issues • Assumes motions between frames are not too large • Hierarchical implementation
Hybrid affine tracker • Use blockmatching to determine several minima of the SSD function • Initialize a differential method with those points and pick the best resulting set of affine parameters
Experimental results (1) • Setup: • Padded image borders • Affine parameter quantization with step 0.2 • DCT error quantization with step 1.0 • Block size = 16
Experimental Results(2) • Small, translation motion between frames • Hybrid MCHC rates are comparable Frame1234 Trate 4.1359 2.4845 2.4557 2.5346 Hrate 4.1359 2.4846 2.4556 2.5350 Diff 0 -0.0001 0.0001 -0.0004
Experimental Results (3) • Relatively large motion, rotation present Frame 1234 TRate 5.6845 3.8926 3.8737 3.8393 Hrate 5.6845 3.8927 3.8702 3.8382 RateDiff 0 -0.0001 0.0035 0.0011
Experimental Results (4) • Block Choices • 0: translation 1: affine
Experimental Results (5) • Block size = 32, param quantization step = 0.1 Frame1234 Trate 5.8776 4.0643 4.0980 4.0747 Hrate 5.8776 4.0608 4.0851 4.0704 Diff 0 0.0035 0.0131 0.0043
Conclusions • Not too effective system • Small improvements • Increases running time • Limitation on accuracy of transmission and amount of motion • Improvement (better rate, same quality) • Larger blocksizes • Complex motions