Download
1 / 29
290 likes | 637 Views
Feature Extraction and Matching Feature Tracking Sudipta N Sinha Sep 19, 2006. Outline. Feature Extraction and Matching (for Larger Motion) What are features ? Tasks Detection: finding the feature locations Representation: computing a compact descriptor

E N D
Feature Extraction and MatchingFeature TrackingSudipta N SinhaSep 19, 2006
Outline • Feature Extraction and Matching (for Larger Motion) • What are features ? • Tasks • Detection: finding the feature locations • Representation: computing a compact descriptor • Matching: Finding distances in feature space. • Algorithms: • Harris Corner Detector, SIFT. • More complex (wide-baseline correspondence) • Tracking (for Small Motion) • Track geometric primitives (points, lines, patches, objects …) from frame to frame in video. • High temporal coherence. • Typically required in a real-time system.
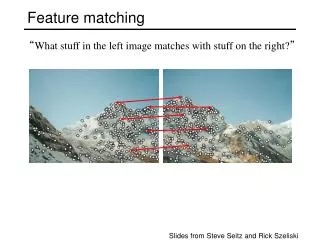
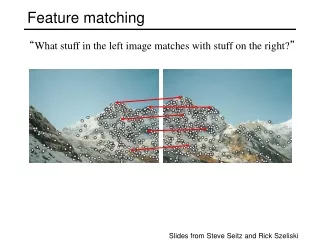
Matching comes up in all kinds of problems in computer vision Panoramas, mosaics Structure from Motion ( F, T , … ) Object recognition More: Detect object in clutter, Motion segmentation, Image-based retrieval, Video mining .. (Check Papers in References)
The Correspondence Problem and Invariance Invariance:Features need to be detected repeatedly at the same locations and the computed descriptors must be similar in-spite of the following type of changes observed in two images of the same scene.
Point Features (Interest Points) Goal: • To detect the same point in each image independently Challenges: • Need repeatability in presence of Scale, Rotation, Affine distortions and Illumination change • Not all pixels are good candidates. • Texture-less regions, edges. • Effect of noise on feature extraction. • Examples: • Harris Corner Detector, SIFT
Harris Corner Detector Idea: • Detect a patch which looks locally unique. • Shifting the patch in any direction will give a large change in intensity. Texture-less region: no change in all directions Edge: no change along one direction. Corner: large changes in all direction.
A symmetric matrix represents an ellipse Matrix is symmetric semi-definite
Harris Corner Detector Eigen-value analysisof the 2x2 matrix M:
Corners:Feature Descriptors and Matching. • Simple Descriptor: convert a patch of n x n pixels centered at that pixel into a vector. • Matching: SAD, SSD, ZMNCC • Invariance: • Translation ? Yes • Rotation ? No. But the image patch could be re-sampled using eigen-vector pair as the local coordinate frame. • Scale and Affine ? No • Brightness Change ? Yes, normalize image intensity (ZMNCC) Feature point in high dim feature space
Point Features: SIFT First: Scale Invariant Feature Detection, Later: SIFT descriptors (rotational invariance)
The SIFT Algorithm (Lowe IJCV’04) Create Scale Space Stack : • Intensity • Gradient • DoG Images from SIFT Tutorial [Thomas F. El-Maraghi May 2004 ]
The SIFT Algorithm • Find Local Extrema of DoG • in Scale Space. • Remove • Low Contrast Point • Points on Edges. Images from SIFT Tutorial [Thomas F. El-Maraghi May 2004 ]
The SIFT Algorithm • Descriptor represents Local Patch Appearance. • Oriented Histograms built from Weighted Gradients. Images from Lowe IJCV’04
Wide Baseline Matching: Elliptical and Parallelogram features(Tuteylaar, Van Gool et. al. IJCV 2004) Anchor point: Traditional Corners
Wide Baseline Matching: Elliptical and Parallelogram features(Tuteylaar, Van Gool et. al. IJCV 2004) Anchor point: local intensity maxima
Tracking Corners – The KLT algorithm Main Idea: Assuming brightness constancy, try to find the new positions of some ‘salient’ image points in the second image (where the motion is small) Steps: • Detecting Salient Points to track (in current frame) • Track those features in next frame Could be done by Searching (Template matching) BUT KLT algorithm does this analytically, hence its faster !
KLT equations: Assumption – Brightness Constancy Find a displacement d, such that the error given by the following equation is minimized (over a tracking window )
KLT equations: Assumption – Brightness Constancy Find a displacement d, such that the error given by the following equation is minimized (over a tracking window )
KLT equations: A symmetric form was later proposed by Tomasi, as follows To estimate d, differentiate w.r.t d,
KLT equations: Substituting Taylor Series Expansion for J(.) and I(.) We get, Setting derivative to zero at the minima, and re-arranging, we get a linear system of equations for d
Multiscale and Iterative KLT Build Image Pyramid Coarse to Fine Tracking Increases Effective Spatial Range within which features can be tracked. View Dependent Effects : If surface patch is small, then large persective distortions can be approximated by an affine transformation Brightness change = gain + offset (2 more parameters) Affine KLT Invariance to illumination
Acknowledgments Slides/Figures were taken from – • SIFT MATLAB tutorial - [Thomas F. El-Maraghi May 2004] • Lecture Notes by Bill Freeman • Lecture Notes on Tracking: UWA Computer Science, CITS 4240. • David Lowe’s SIFT papers • Stan Birchfield’s article on Symmetric Version of KLT equations.
References and Papers • Stan Birchfield.KLT: An Implementation of the Kanade-Lucas-Tomasi Feature Tracker • [2] Bruce D. Lucas and Takeo Kanade. An Iterative Image Registration Technique with an Application to Stereo Vision.International Joint Conference on Artificial Intelligence, pages 674-679, 1981. • David Lowe, ‘Distinctive image features from scale-invariant keypoints’, Int. Journal of Computer Vision, 60(2):91–110, 2004. • J. Matas, O. Chum, U. Martin, and T. Pajdla. Robust wide baseline stereo from maximally stable extremal regions. In Proc. British Machine Vision Conference, volume 1, pages 384–393, Sep 2002. • K. Mikolajczyk and C. Schmid. Scale and affine invariant interest point detectors. Int. Journal of Computer Vision, 1(60):63–86, 2004 • T.Tuytelaars and L. Van Gool. Matching widely separated views based on affine invariant regions. Int. Journal of Computer Vision, 1(59):61–85, 2004 • K. Mikolajczyk, T. Tuytelaars, C. Schmid, A. Zisserman, J. Matas, F. Schaffalitzky, T. Kadir, and L. Van Gool. A comparison of affine region detectors. Technical Report, accepted to IJCV, 2005 • KLT src code: http://www.ces.clemson.edu/~stb/klt/ • SIFT Matlab code: see Link at http://robots.stanford.edu/cs223b04/project9.html