Download
1 / 8
80 likes | 95 Views
Comparison of nonlinear force-free field models, computational requirements, boundary conditions, and quantifying success using Solar-B observations for modeling the coronal field over active regions. Discusses challenges, solutions, and future improvements in this modeling process.

E N D
Considerations on using Solar-B observations to model the coronal field over active regions Karel Schrijver, Marc DeRosa, Ted Tarbell SOT-17 Science Meeting; 19 April 2006
Field modeling methods • Comparison of 6 non-linear force free-field models reveals: • Analytical test cases can be successfully modeled. • Solutions are very sensitive to boundary conditions (which reflect the field in the [distant] surroundings of a region), as well as to errors in the vector field of the strong-field regions. Owing to this, models should not be expected to match high, weak fields. • Convergence is sensitive to initial field configuration. • Models differ by a factor of one million in CPU time per step. • Best-performing model: the Wheatland et al. (2000) optimization method as implemented by Wiegelmann (2004). See: Schrijver et al., SPh 2006, in press; “Non-linear force-free modeling of coronal magnetic fields. I. A quantitative comparison of methods. URL: http://www.lmsal.com/~schryver/Public/ms/nlfff1.pdf
Computational requirements • Best current model requires ~8,000 CPU hrs for a 1024x1024x128-pixel cube. • Improvements? • Hierarchical algorithm does not provide adequate reduction of time required owing to sensitivity to resolution. • Massive parallelization is required (and possible) for routine application of high-resolution field modeling. • Subregion modeling that may be imposed by CPU requirement requires proper implementation of boundary conditions of subvolume.
Boundary and initial conditions • Essential property of NLFFF models: constant ratio of current density and field strength along lines of force. • Therefore: complete flux and current systems must be observed to avoid complete redirection of coronal field lines (see examples). • Possible FPP implementation: observe entire active regions (and connected neighboring regions) in context with higher-frequency observations of a smaller region of interest (pre-&post- large-area scans, or SOLIS, …)
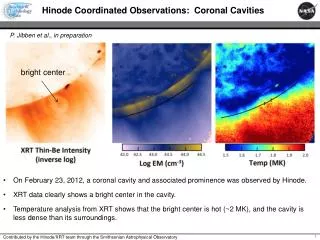
Boundary and initial conditions Including information on surrounding field Disregarding surrounding field For the best-fit model, the relative vector difference between input and model field has an average magnitude of 2%, and the average energy density in the field is approximated to within a few percent.
Chromospheric compass • Photospheric field observed by FPP is not necessarily force-free. • Observation of the chromospheric fibrils (using H) as frequently as the vector field provides a “chromospheric compass”. • Observations may guide field modeling, or at least identify regions where photospheric Lorentz forces are substantial (where field model and fibril directions do not match).
Quantifying success • Currently, no metric exists to quantify how well a field extrapolation matches the solar field. • The absence of such a metric hinders us in • setting uncertainties on estimates of (free) energy and helicity, and • using the observed coronal field to guide field modeling.
3rd NLFFF meeting • A small hands-on workshop for NLFFF modelers to develop and test algorithms: June 5-7, 2006, Palo Alto, CA. For information, contact Karel Schrijver, Tom Metcalf, or Marc DeRosa.