Download
1 / 2
20 likes | 150 Views
Assume that the end-point of the robot is constrained by the external environment and the geometric constraints can be described as: where is the vector of task coordinates associated with the robot end-effector,

E N D
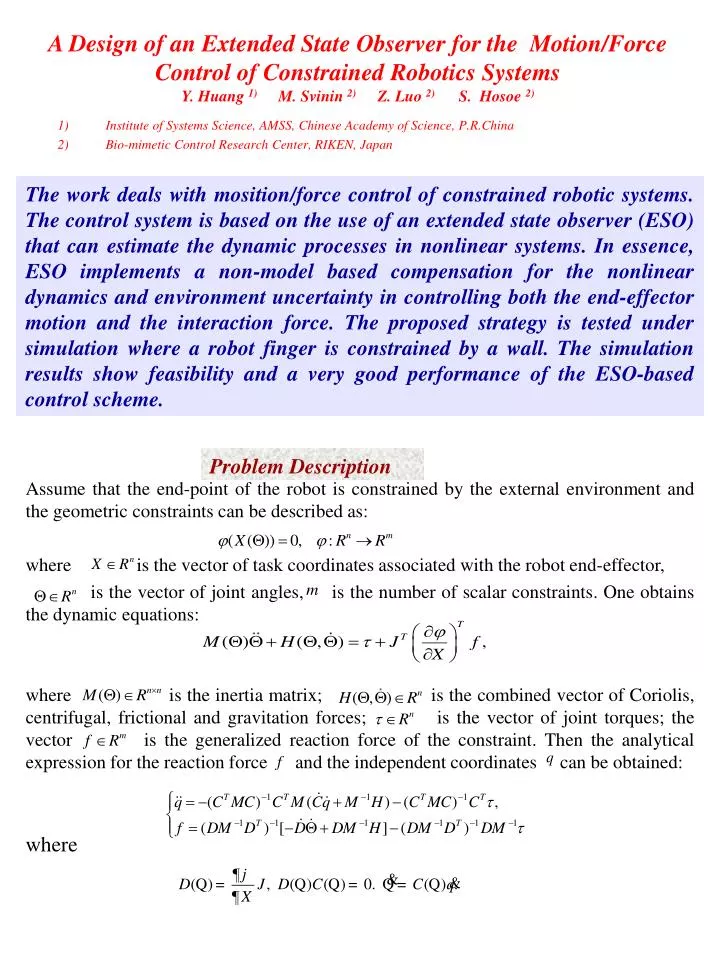
Assume that the end-point of the robot is constrained by the external environment and the geometric constraints can be described as: where is the vector of task coordinates associated with the robot end-effector, is the vector of joint angles, is the number of scalar constraints. One obtains the dynamic equations: where is the inertia matrix; is the combined vector of Coriolis, centrifugal, frictional and gravitation forces; is the vector of joint torques; the vector is the generalized reaction force of the constraint. Then the analytical expression for the reaction force and the independent coordinates can be obtained: where • Institute of Systems Science, AMSS, Chinese Academy of Science, P.R.China • Bio-mimetic Control Research Center, RIKEN, Japan A Design of an Extended State Observer for the Motion/Force Control of Constrained Robotics SystemsY. Huang 1) M. Svinin 2) Z. Luo 2) S. Hosoe 2) The work deals with mosition/force control of constrained robotic systems. The control system is based on the use of an extended state observer (ESO) that can estimate the dynamic processes in nonlinear systems. In essence, ESO implements a non-model based compensation for the nonlinear dynamics and environment uncertainty in controlling both the end-effector motion and the interaction force. The proposed strategy is tested under simulation where a robot finger is constrained by a wall. The simulation results show feasibility and a very good performance of the ESO-based control scheme. Problem Description
Basic Control Strategy Simulation Research The simulation model comes from the experimental device of a multi-fingered robot hand shown in Fig.1. Suppose that the finger is commanded to polish a wall that can be described as: and exert the contact force . However, instead of the exact geometric constraint, we only have a vague approximation about the constraint as follows: Experimental setup of the multi-fingered robot hand and kinematic scheme of the finger Motion in the task space(Y-Z space) force response Manipulator dynamic estimation( , ) Force dynamic estimation( , )