Download
1 / 43
430 likes | 564 Views
Properties of Tree Convex Constraints. Authors: Yuanlin Zhang & Eugene C. Freuder Presentation by Robert J. Woodward CSCE990 ACP, Fall 2009. Overview. Introduction Definitions Basic, support, image, consistency, trees, tree intersection, tree convex constraint, tree convex CSPs,

E N D
Properties of Tree Convex Constraints Authors: Yuanlin Zhang & Eugene C. Freuder Presentation by Robert J. Woodward CSCE990 ACP, Fall 2009
Overview • Introduction • Definitions • Basic, support, image, consistency, trees, tree intersection, tree convex constraint, tree convex CSPs, • Properties • Intersection & composition on tree convex constraints • Consecutiveness: definition & composition • Tractable Networks • Locally Chain Convex • Local Chain Convex & Strictly Union Closed (LCC&SUC) • (One) Application • Related Work • Conclusion
Story • Introduces tree convexity PC tree convexity global consistency • PC uses the operators ◦ and • ◦ ‘damages’ the tree convexity property • Introduces ‘consecutiveness’ property, which is closed under ◦… but not under • Introduces ‘locally chain convex’ (LCC) property, which is closed when domains are filtered, but is not closed under ◦ • Introduces ‘locally chain convex & strictly union closed’ (LCC&SUC) which is closed under ◦ and PC LCC&SUC global consistency
Introduction {a,b,c} {a,b, c,d} • Binary constraint network • Tree Convex • Construct a tree for a variables domain • All allowed supports must form subtree • Linear-time algorithm can detect tree convexity [Conitzer+ AAAI04] cxy x y a cxy= b c d Tree for y
Introduction {a,b,c} {b,c,d} • Binary constraint network • Tree Convex • Construct a tree for a variables domain • All allowed supports must form subtree • Linear-time algorithm can detect tree convexity [Conitzer+ AAAI04] cxy x y b cxy = c d Tree for y
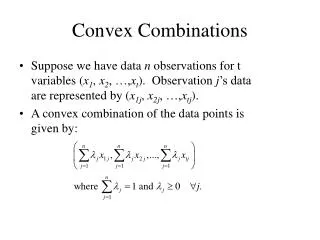
Definitions: Basic • Constraint networks (Binary) • Variables: V = {x1,x2,…,xn} • Domains: Di for each xiϵ V. Finite • Constraints: Between ordered variables • Constraint between (x,y) is cxy • cyx is a different constraint • Operations (on constraints) • Intersection (∩) • Composition (◦) • Inverse
Definitions: Support, Image {a,b,c} {a,b, c,d} • For a constraint cxy • Value u ϵDx • Value v ϵ Dy • support: u and v satisfy cxy • image of u under cxy • denoted Iy(u) • Set of supports in Dy • image of a subset of Dx • Union of images of its values cxy x y cxy= • What is Iy(b)? • {a,c,d}
Definitions: Basic Consistency • k-consistency • Any distinct k-1 variables can be consistently extended to another • Strongly k-consistent • j-consistent for all j≤k • Globally consistent: strongly n-consistent • Strongly 2-consistency: arc consistent • Strongly 3-consistency: path consistent
Definitions: Trees • Tree • Connected graph without any cycles • Path between any two nodes is unique • Distance of a node to the root is the number of edges in the path • Subtree is a connected subgraph of the tree. • Root is the node closed to root of tree • Chain • At most one child per node • Last value of chain furthest away from root • Forest • Graph without any cycles • Can also be looked at as a set of trees • Assume root for a tree in a forest • Forest on a set S • vertex set is exactly S • Set I is subtree of a forest • If there exists a subtree of some tree whose vertex set is exactly I • Note: Ø subtree of any forest
Definitions: Tree Intersection Common Tree: • Intersection of two trees on a common tree is a tree whose vertices and edges are in both trees • Proposition 1: Intersection of two trees is a subtree of the tree • If the intersection is not empty, root of intersection is root of one of the trees x y a z b c d e f a x ∩ b d a b c
Definitions: Tree Intersection Common Tree: • Intersection of two trees on a common tree is a tree whose vertices and edges are in both trees • Proposition 1: Intersection of two trees is a subtree of the tree • If the intersection is not empty, root of intersection is root of one of the trees x y a z b c d e f a x ∩ b d a b c
Definitions: Tree Convex • Definition 1 • Sets E1,…,Ekare tree convex with respect to a forest T on Uiϵ1..kEi • If every Ei is a subtree of T a • Sets that are tree convex • {a,b,c} • {a,b,d} • {a,d} • {a,c} • {d} • … b c d
Definitions: Tree Convexity on cxy {a,b,c} {a,b, c,d} • Definition 2 • A constraint cxy is tree convex with respect to a forest T on Dy if the images of all values of Dx are tree convex with respect to T cxy x y a cxy = b c d Tree for y
Definitions: Tree Convex CSP • A CSP is tree convex • If there exists one forest for every variable & • Every constraint in CSP is tree convex with respect to this forest • Tree convex CSP is globally consistent if it is path consistent • Proof in [Zhang & Yap, IJCAI 2003] • Let R be a network of constraints with arity at most r and R be strongly 2(r-1)+1 consistent. If R is tree convex then it is globally consistent • For binary constraints • strongly 2(2-1)+1 consistent = path consistent
Definition: Proof [Zhang &Yap 03] • Tree convex constraint network is globally consistent if it is path consistent • Network is path consistent • Prove by induction k consistent • k ϵ {4,…,n} • Consider instantiation of any k-1 variables and any new variable x • Number of relevant constraints be l • For each relevant constraint there is one extension to x • We have l extension sets. • If intersection of all l sets is not empty, x satisfies all relevant constraints • Consider two of the l extension sets, E1 and E2 • Consistency lemma • if network is path consistent • Ix(E1)∩Ix(E2) Ø • Since all constraints in l are tree convex • Extension sets are tree convex • Tree convex sets intersection lemma • ∩Ix(EiϵL)ØiffIx(Ej)∩Ix(Ek) Ø • From consistency lemma, we have k-consistent • Network is k+1 consistent iff any instantiation of k distinct variables and a new variable, ∩Ic(EiϵL) Ø • Therefore, by induction • globally consistent
Overview • Introduction • Definitions • Basic, support, image, consistency, trees, tree intersection, tree convex constraint, tree convex CSPs • Properties • Intersection & composition on tree convex constraints • Consecutiveness: definition & composition • Tractable Networks • Locally Chain Convex • Local Chain Convex & Strictly Union Closed (LCC&SUC) • (One) Application • Related Work • Conclusion
Properties: Intersection & Composition c1xy y x • Assume c1xy c2xyare tree convex to a forest T on domain Dy • Prove there intersection is tree convex • Let cxy = c1xy c2xy • For any v in Dx • images under c1xy and c2xy are subtrees of T • intersection of two images is a subtree of T by Proposition 1 • Every image of every v in Dx is a subtree of T • Therefore, cxy is tree convex • Composition does not preserve tree convexity a a c2xy x y b b c c d d c1xy c2xy
Properties: Consecutiveness {a,b,c} {a,b, c,d} • Consecutive • Tree convex constraint cxy with respect to a forest Ty on Dy is consecutive with respect to a forest Tx on Dx • iff every two neighboring values a,b on Tx, Iy(a) U Iy(b) is subtree of Ty • Constraint Network tree convex and consecutive • exists a forest on each domain • every constraint cxy is tree convex and consecutive with respect to the forests on Dy and Dx cxy x y a {a,b,c} cxy = {a,b,c,d} b c d a b c Tree for y Tree for x
Properties: Consecutiveness composition x y z • Class of consecutive tree convex constraints is closed under composition • Let cxy and cyz be two consecutive tree convex constraints with trees Tx, Ty, and Tz • cxz is their composition • cxz is tree convex • v in Dx • image under cxz = UbϵIy(v)Iz(b) • Union of images of neighboring values in Iy(v) is subtree of Tz, union of all values in Iy(v) is a subtree too • cxz is consecutive • u,v in Dxand neighbors under Tx • Since cxy is consecutive, Iy(u) U Iy(v) is subtree to Ty • Iy(u) U Iy(v) is also a subtree of Tz because of consecutiveness of Cyz • So, Iz(u) U Iz(v) is a subtree of Tz a a a b b b c c c d d d cxy cyz
Properties: Consecutiveness composition x y z • Class of consecutive tree convex constraints is closed under composition • Let cxy and cyz be two consecutive tree convex constraints with trees Tx, Ty, and Tz • cxz is their composition • cxz is tree convex • v in Dx • image under cxz = UbϵIy(v)Iz(b) • Union of images of neighboring values in Iy(v) is subtree of Tz, union of all values in Iy(v) is a subtree too • cxz is consecutive • u,v in Dxand neighbors under Tx • Since cxy is consecutive, Iy(u) U Iy(v) is subtree to Ty • Iy(u) U Iy(v) is also a subtree of Tz because of consecutiveness of Cyz • So, Iz(u) U Iz(v) is a subtree of Tz a a a b b b c c c d d d cxy cyz
Overview • Introduction • Definitions • Basic, support, image, consistency, trees, tree intersection, tree convex constraint, tree convex CSPs • Properties • Intersection & composition on tree convex constraints • Consecutiveness: definition & composition • Tractable Networks • Locally Chain Convex • Local Chain Convex & Strictly Union Closed (LCC&SUC) • (One) Application • Related Work • Conclusion
Tractable Networks: Locally Chain Convex {a,b,c} {a,b, c,d} • Intersection of two subtrees could be empty • Image of value could be empty • Deleting value makes constraint not tree convex • Locally chain convex • Constraint cxy with respect to a forest on Dy • iff image of every value in Dx is subchain of forest • Constraint network locally chain convex • iff exists forest on each domain such that every constraint is locally chain convex cxy x y a cxy = b c d Tree for y
Tractable Networks: Locally Chain Convex • Locally chain convex constraint network is locally chain convex after removal of any value from domain • Consider a variable y • Assume forest on Dy is Ty • Value v is removed from Dy • Need to show every cxy in C is locally chain convex • Could have made images on Dx not connected • Construct new forest Ty’’ on Dy • broken subchains will be reconnected
Tractable Networks: Locally Chain Convex • Let v1,…,vlbe children of v • Let pv be parent of v • Construct a new forest Ty’ from Ty • Remove v and all edges incident on v • Construct Ty’’ from Ty’ • Add edge between pv and all vi • If v is root of Ty, let Ty’’ be Ty’ pv pv pv v v v2 v1 v2 v1 v2 v1 Ty Ty’ Ty’’
Tractable Networks: Locally Chain Convex • Let v1,…,vlbe children of v • Let pv be parent of v • Construct a new forest Ty’ from Ty • Remove v and all edges incident on v • Construct Ty’’ from Ty’ • Add edge between pv and all vi • If v is root of Ty, let Ty’’ be Ty’ v v v2 v1 v2 v1 v2 v1 Ty Ty’ Ty’’
Tractable Networks: Locally Chain Convex (Composition) x y z • Composition may destroy local chain convexity • To get tractable class we need to combine • Local chain convexity • For deleting a value • Consecutiveness • For composition a a a a a b b b b b c c c c c d d d d d cxy cyz x z cxz
Tractable Networks: LCC&SUC x y z • Locally chain convex and strictly union closed (LCC&SUC) • With respect to forest Tx on Dx and Ty on Dy • image of any subchain in Tx is subchain in Ty • Constraint network is locally chain convex and strictly union closed • every constraint cxy is locally chain convex and strictly union closed with respect to the forests Dx and Dy a a a b b b c c c d d d cxy cyz • Consider subchain {a,b} in y. What are images in z? • {b,c}, it is a subchain • Consider subchain {b,d} in y. What are images in z? • {b,c,d}, it is not a subchain
Tractable Networks: LCC&SUC (Properties) • A locally chain convex and strictly union closed constraint network can be transformed to an equivalent globally consistent network in polynomial time • (After applying 2 & 3 consistency)
Tractable Networks: LCC&SUC (Proof) • Arc consistency removes values from domains • Show: After removing any value v in Dy, still LCC&SUC • Case 1: any cxy, forest Tx on Dx, Ty on Dy • Construct a new forest Ty’’ for y such that for every subchain of Tx, its image is still a subchain under Ty’’ • What we did in our last proof
Tractable Networks: LCC&SUC (Proof) • Since cxy LCC&SUC, image of tx must be a subchain containing (pv,v,cv) • image of u must be on or contain subchain(pv,v,cv) • v only support of u • u should also be removed • after removal of tr, image of ty is now connected and u is a subchain • Case 2: any cyx, forest Tx on Dx , Ty on Dy • If it is LCC&SUC we are done • Exists subchainty of Ty such that it contains v and image is no longer connected graph after v removed • Let tx be image of ty before v removed • After v removed, breaks tx into two chains • Let gap in tx be tr • Let r be root and l last node in tr • pv and pr be parents of v and l • cv and cl be children of v and l • Consider any node u in tr • u supported by v but not pv or cv in ty pr tx pv r u tr ty v l cv cl Ty Tx
Tractable Networks: LCC&SUC (Proof) x y z • Path consistency preserves LCC&SUO • cxz = cxz∩cyz◦cxy • First: Composition of cxy and cyz is LCC&SUC • Any subchaintx in Dx, its image t’y under cxy is a subchain • Since image of t’y with respect to cyz is a subchain of Dz • Image of tx under composition is subchain of Dz a a a b b b c c c d d d cxy cyz
Tractable Networks: LCC&SUC (Proof) x y z • Second: show intersection is LCC&SUC, where c’xz cyz◦cxy c’’xz cxzc’xz • Subchaintx with only one value of Dx • Its images under cxz and c’xz are subchains of forest on Dz • Intersection is still a subchain, so v’s image under c’’xzis subchain a a a b b b c c c d d d cxy cyz c’xz cxz= Dx Dz
Tractable Networks: LCC&SUC (Proof) x z • Subchaintx with more than one value of Dx • If image is subchain of Dz, done • Since intersection does not form cycle • image of txnot connected • Starting from root of tx • Find first value (v) whose image is disjoint from image of parent • Let a be last value of parents image • Let d be root of v images • Let u be any value between a and d pv a b v c c1 c2 d
Tractable Networks: LCC&SUC (Proof) x z • Show there is no support for u • pv images under • cxz = I(pv), c’xz = I’(pv) • I(pv)∩I’(pv) is subchain of Dz • I(pv) and I’(pv) are chains • a is last value of one I(pv)or I’(pv) • pv not in u’s image under czx • I(u) has to be below parent since I(u) is chain • I(v) and I’(v) images of v under cxz and c’xz • I(v) should include d and all values between a and d in forest Dz • Because cxz is LCC&SUC • Since d is root of ∩, I’(v) includes d but not does include anything above d • v is not support of u • I’(u) has to be above v • Image of u under c’’xz is empty c’xz pv a b v c c1 c2 d cxz pv a b v c c1 c2 d
Tractable Networks: LCC&SUC (Proof) • Original constraint network • Might not be constraint between x and y • Assume graph of original network is connected • So there must be a path • All constraints on path are LCC&SUC are closed • C’xy composition of constraints over path • C’xy is also LCC&SUO • Before enforcing path consistency set constraint between x y to be c’xy and repeat for any two variables without direct constraint • Now before path consistency • Any two variables there is a constraint on them that is LCC&SUC
Application • Scene Labeling (As seen before from “On the Minimality and Global Consistency of Row-Convex Constraint Networks”) • Line with label • Convex (+) • Concave (-) • Boundary (>) • Junction constraints • Fork • Arrow • Ell + + - - - - + - - + + - - - + + + - + -
7 3 Application 1 5 4 2 6 b + + - - - - c d e a + - - c21= v u + + - - w - + + 2 4 5 c31= + - 1 3 6 + - c51= c24= c37= c56= c26= c34= c57=
Related Work (1) • Jeavons and colleagues • Characterize complexity of constraint languages • A constraint language over D is a set of relations with finite arity • CSP associated with language L, denoted CSP(L), are triple (V,D,C) • V = arbitrary set of variables • D = domain of each variable of V • C = set of constraints • Constraint Language L over D is tractable if CSP(L’) can be solved in poly • Set of problems (V,D,C) • V = {1,2,…,n} • D = {D1,D2,…,Dn} Di= arbitrary finite set • C = set of constraints • Tractability of constraint language is not the same as a set of problems • Constraint Language involves fixed domain and fixed set of relations • All variables in different instances of CSP(L) have same domain
Related Work (2) • Multi-sorted constraint languages over more than one set • CSP associated with multi-sorted language over {D1,D2,…,Dk} • Variables in CSP(L) can take any Di • Big gap between multi-sorted language and set of problems
Related Work (3) • Focus on constraint language L over D • Every relation R in L satisfies LCC&SUC • Enforcing arc and path consistency guarantees global consistency • In this situation, [Jeavons et al. AIJ98] gives general characterization of all constraint languages which enforcing k-consistency ensures global consistency • LCC&SUC explains specific subclcassof these languages
Related Work (4) • [Kumar 06] uses randomized algorithms to show the tractability of “arc consistent consecutive tree convex” (ACCTC) networks • No deterministic algorithm is known to exist for this purpose • Efficient recognition of constraints • Known: tree convexity [Zhang & Bao 08] • Still open • ACCTC • Connected row convexity • Locally chain convexity, and • Strictly union closedness
Conclusion LCC&SUC (PC global consistency) Question: How does LCC&SUC relate to row convexity (RW)? LCC&SUC is likely stronger than RW but authors do not show that RW is a special case of LCC&SUC
Thank You • Any questions? • I know I would…