Download
1 / 19
190 likes | 280 Views
IARP/EURON Workshop on Robotics for Risky Interventions and Environmental Surveillance. Mobile robot simulators and their application to hazardous and challenging environments. L. Nomdedeu, J. Sales, E. Cervera, J. Alemany, R. Sebastia, K. McAllister.

E N D
IARP/EURON Workshop on Robotics for Risky Interventions and Environmental Surveillance Mobile robot simulators and their application to hazardous and challenging environments L. Nomdedeu, J. Sales, E. Cervera, J. Alemany, R. Sebastia, K. McAllister January 7th-8th, 2008 - Benicàssim (Spain)
Overview • Introduction • The Player / Stage / Gazebo tools • Installation and configuration • Setting up a scenario • Conclusion and future work
Introduction: motivation • Multiple robot platforms and sensors. • Cross-platform development. • Reuse of robot software • Simulation aid: • evaluation of algorithms • training
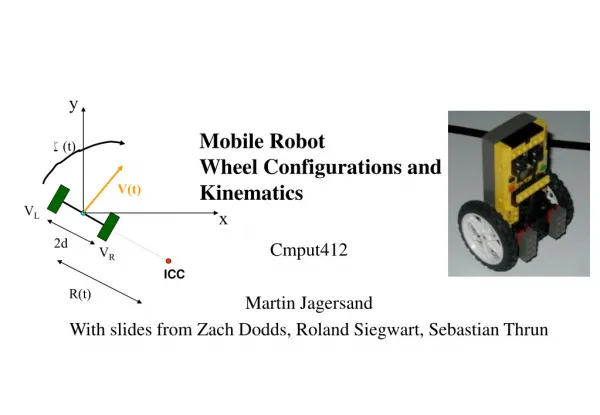
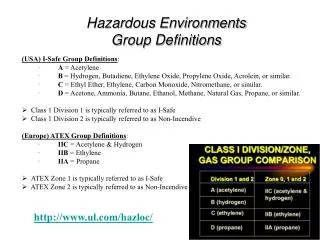
Introduction: related work • Mobile platforms: • K-team Khepera • Pioneer / Erratic • Robotnik rescuer • Robot Development Environments. • Proprietary versus Open Source. • Mobile robot simulators. • 2D versus 3D.
Introduction: list of choices • Open Source: • Orocos • Player / Stage (2D) / Gazebo (3D) • Carmen • Marie • USARSim (3D) • Proprietary: • Robot manufacturers • Microsoft Robotics Studio
Player / Stage / Gazebo tools • Open-Source, cross-platform, active. • Player robot device interface • N mobile platforms • M sensors • Algorithm drivers (amcl, vfh, ...) • Tools • Stage 2D simulator • Gazebo 3D simulator
Player tools [Vaughan & Gerkey 07]
Stage 2D simulator [Vaughan & Gerkey 07]
Stage 2D simulator [Vaughan & Gerkey 07]
Gazebo 3D simulator [Vaughan & Gerkey 07]
Installation and configuration • System requirements: • Standard Linux box • Native Windows version planned • Installing: • Package distribution • Source compilation • CVS
A Windows solution • Virtualization. • Any host + Linux P/S guest. • Free (not open) Virtual Machine software. • Full-equipped Linux on a CD (or website). • System requirements: • Non-administrative user account • Modern CPU • 1 GB RAM, 10 GB hard disk
Setting up a scenario • World: • Bitmap / vector map • Models: • Mobile platforms • Sensors • Configuration: • Devices and interfaces • Algorithms
Warehouse fire in 1999 in Worcester (USA) http://www.usfa.dhs.gov/downloads/pdf/publications
Configuration file • World file • Map file Warehouse fire in 1999 in Worcester (USA) http://www.usfa.dhs.gov/downloads/pdf/publications
Conclusion and future work • Player abstraction layer for development. • Player robot device interface. • Stage 2D simulator. • Player algorithm repository. • Installation on any host computer. • Definition of scenarios in Guardians.