Download
1 / 25
250 likes | 398 Views
Maintaining Communication Between an Explorer and a Base Station. Miroslaw Dynia Jaroslaw Kutylowski Pawel Lorek Friedhelm Meyer auf der Heide. Problem statement. Robots moving through terrain (exploring, working …) Base station serves as supply. robot. base station. Problem statement.

E N D
Maintaining Communication Between an Explorer and a Base Station Miroslaw Dynia Jaroslaw Kutylowski Pawel Lorek Friedhelm Meyer auf der Heide
Problem statement • Robots moving through terrain (exploring, working …) • Base station serves as supply robot base station
Problem statement • Robots moving through terrain (exploring, working …) • Base station serves as supply • Robots should self-organize to fulfill their tasks • a communication network is a necessary primitive • How to maintain such a communication network?
Problem statement • Large distances between robots • Mobile relay stations support communication links robot base station
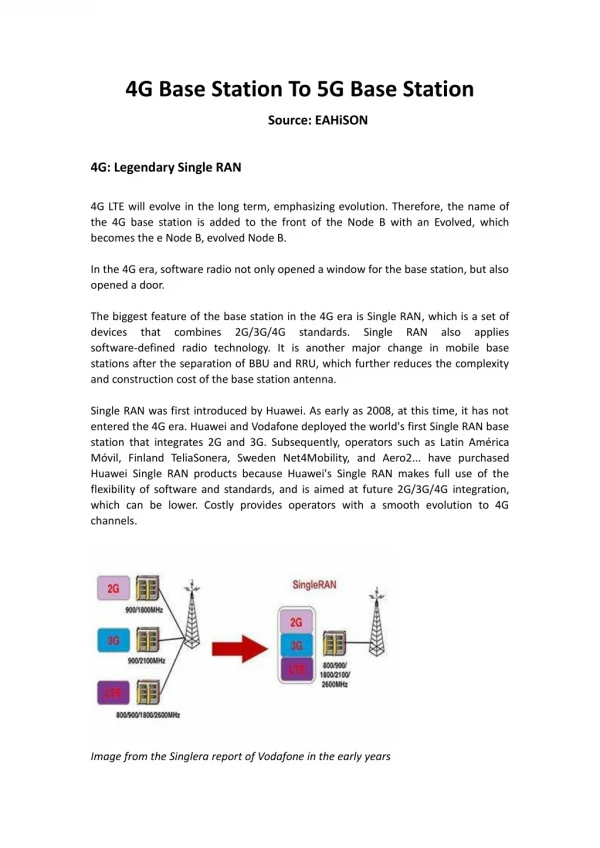
Problem statement • Large distances between robots • Mobile relay stations support communication links • New approach for communication on long distances • Necessary in complicated terrain (mountains…) • Related to backbones in networks (GSM infrastructure) • But: mobile, adaptive and ad-hoc
Problem statement • Large distances between robots • Mobile relay stations support communication links • Robots move • Communication network must react to dynamics • Relays are costly • Use as few as possible Need for a strategy for mobile relay stations Self-organizing robots, organic system local strategy, no communication, simple (no memory)
Agenda • Model • Go-To-The-Middle strategy • Analysis for static case • proof outline • Analysis for dynamic case • review over experiments • theoretical results • Further results & open questions
Model • Plane • One explorer • One base station • Relay stations arranged in a chain explorer base station
Model • Plane • One explorer • One base station • Relay stations arranged in a chain • Two neighbored relay stations in distance at most d • Relay stations should arrange on line between explorer and base station • Static setting – Explorer and base station stand still • Dynamic setting – Explorer moves
Model robot explorer base station base station • Why one explorer makes sense? • to get an understanding of the problem • for multiple explorers an efficient solution to the one-explorer problem is necessary
Go-To-The-Middle • Go-To-The-Middle Strategy • every relay station moves to the middle positionbetween its neighbors • discrete time steps • all stations move in parallel relay i+1 relay i+2 relay i
Go-To-The-Middle • Go-To-The-Middle Strategy • every relay station moves to the middle positionbetween its neighbors • discrete time steps • all stations move in parallel • Properties • simple • memoryless • biologically inspired – bird flocks • related to formation control
Go-To-The-Middle Analysis (static) • Key question • given a valid configuration of relay stations betweenthe explorer and base station • what is the number of Go-To-The-Middle rounds necessary to get the relays next to the optimal line? explorer base station
Go-To-The-Middle Analysis (static) • for each relay consider its distance from the line between explore and base station • describe the distances as a vector • v = (d1,…,dn) di explorer base station
Go-To-The-Middle Analysis (static) • vector v after applying one step of Go-To-The-Middle • v’ = v A • n x n matrix A vector v after applying t steps of Go-To-The-Middle v’ = v At
Go-To-The-Middle Analysis (static) • At the beginning vi ≤ n • We look for a t such thatvi At ≤ 1 and so At ≤ 1/n • Then the distance of each station to the optimal lineis at most 1 • consider a random walk on a line with reflecting barriers ½ ½ ½ ½ ½ ½ ½ ½ ½ ½
Go-To-The-Middle Analysis (static) • each element of line is a state • probability distribution to be in a particular state at beginning • w = (w1,…,wn) • the same probability distribution after t steps of random walk • w’ = w Bt • there are results stating that Bt < 1/n for t=c n2 log n • (elementary Markov Chain theory) ½ ½ ½ ½ ½ ½ ½ ½ ½ ½
Go-To-The-Middle Analysis (static) matrix B random walk on a line and GTM have common background in t=c n2 log n we have At<1/n
Go-To-The-Middle Analysis (static) • what is the number of Go-To-The-Middle rounds necessary to get the relays next to the optimal line? • quite a lot ≈ n2 log n • maybe such bad configurations do not come up in practice? • analysis of Go-To-The-Middle in the dynamic case
Go-To-The-Middle Analysis (dynamic) • Model • base station stands still • explorer moves • explorer starts moving next to base station • whenever needed explorer deploys new relays • one GTM-step for one step of explorer • Analysis goal • monitor the number of relay stations used • compare to the number needed for a perfect line • ratio R
Go-To-The-Middle Analysis (dynamic) • Experimental evaluation • explorer moves on a circle around base station • hard case • for every distance, the number of relay stations reaches a stability point • ratio R grows linearly with the distance of explorer to base station
Go-To-The-Middle Analysis (dynamic) • Experimental evaluation • explorer performs a (bayesian) random walk on plane • ratio R remains constant
Go-To-The-Middle Analysis (dynamic) • Model • explorer deploys new relay stations only when moving away from base station • explorer waits when distance to last relay station is too large • Analysis • what is the speed of the explorer? (how much must he wait?) • Result • speed of explorer ≈1/d with d the distance to base station
Further results & open questions • Further (unpublished) results • reducing the locality and simplicity (to some extent) one can obtain much better performances • extension to terrain with obstacles • Open questions • can one improve the performance without sacrificing locality and simplicity? • general lower bound for local strategies? • multiple explorers
Thank you for your attention! Heinz Nixdorf Institute & Computer Science Institute University of Paderborn Fürstenallee 11 33102 Paderborn, Germany Tel.: +49 (0) 52 51/60 64 66 Fax: +49 (0) 52 51/62 64 82 E-Mail: jarekk@upb.de http://wwwhni.upb.de/alg