Download
1 / 1
20 likes | 153 Views
深海滑翔机. 通信定位天线. 舵板. 中国科学院沈阳自动化研究所. 航行控制舵. 浮力调节与通信舱段. CTD 传感器. 控制与观测舱段. 水平翼. 浊度计、叶绿素.

E N D
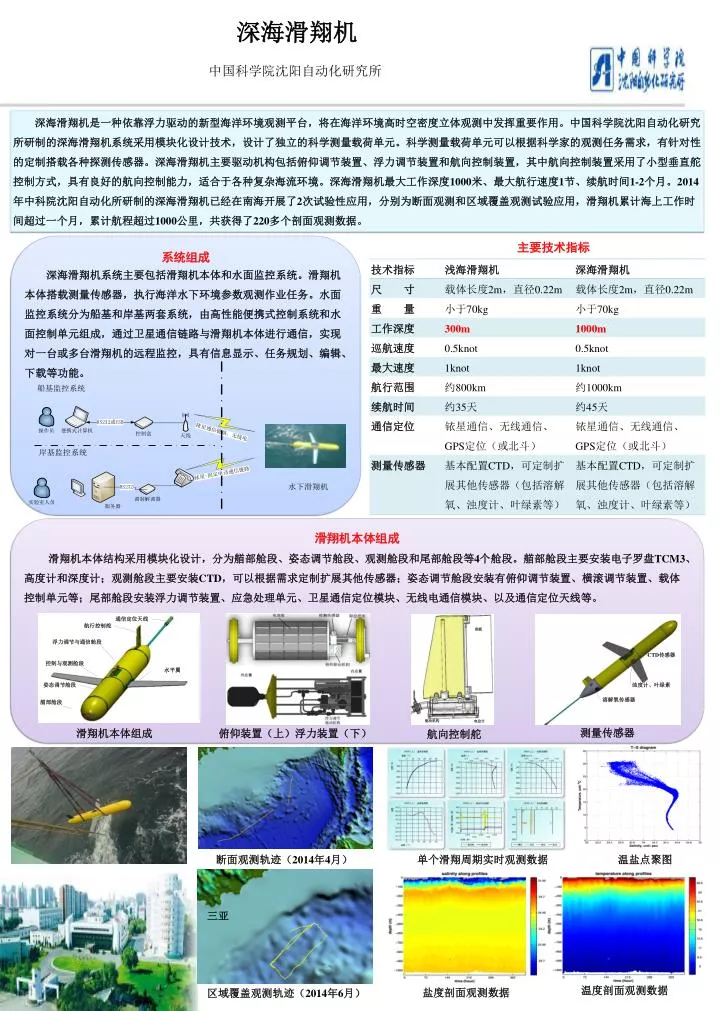
深海滑翔机 通信定位天线 舵板 中国科学院沈阳自动化研究所 航行控制舵 浮力调节与通信舱段 CTD传感器 控制与观测舱段 水平翼 浊度计、叶绿素 深海滑翔机是一种依靠浮力驱动的新型海洋环境观测平台,将在海洋环境高时空密度立体观测中发挥重要作用。中国科学院沈阳自动化研究所研制的深海滑翔机系统采用模块化设计技术,设计了独立的科学测量载荷单元。科学测量载荷单元可以根据科学家的观测任务需求,有针对性的定制搭载各种探测传感器。深海滑翔机主要驱动机构包括俯仰调节装置、浮力调节装置和航向控制装置,其中航向控制装置采用了小型垂直舵控制方式,具有良好的航向控制能力,适合于各种复杂海流环境。深海滑翔机最大工作深度1000米、最大航行速度1节、续航时间1-2个月。2014年中科院沈阳自动化所研制的深海滑翔机已经在南海开展了2次试验性应用,分别为断面观测和区域覆盖观测试验应用,滑翔机累计海上工作时间超过一个月,累计航程超过1000公里,共获得了220多个剖面观测数据。 姿态调节舱段 溶解氧传感器 驱动机构 电位计 艏部舱段 系统组成 深海滑翔机系统主要包括滑翔机本体和水面监控系统。滑翔机本体搭载测量传感器,执行海洋水下环境参数观测作业任务。水面监控系统分为船基和岸基两套系统,由高性能便携式控制系统和水面控制单元组成,通过卫星通信链路与滑翔机本体进行通信,实现对一台或多台滑翔机的远程监控,具有信息显示、任务规划、编辑、下载等功能。 主要技术指标 滑翔机本体组成 滑翔机本体结构采用模块化设计,分为艏部舱段、姿态调节舱段、观测舱段和尾部舱段等4个舱段。艏部舱段主要安装电子罗盘TCM3、高度计和深度计;观测舱段主要安装CTD,可以根据需求定制扩展其他传感器;姿态调节舱段安装有俯仰调节装置、横滚调节装置、载体控制单元等;尾部舱段安装浮力调节装置、应急处理单元、卫星通信定位模块、无线电通信模块、以及通信定位天线等。 测量传感器 滑翔机本体组成 俯仰装置(上)浮力装置(下) 航向控制舵 断面观测轨迹(2014年4月) 单个滑翔周期实时观测数据 温盐点聚图 三亚 温度剖面观测数据 盐度剖面观测数据 区域覆盖观测轨迹(2014年6月)
