Download
1 / 1
10 likes | 118 Views
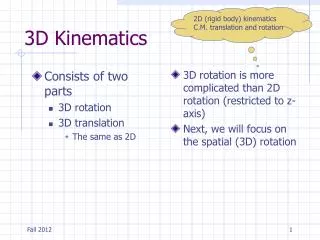
Figure 2: The Linear Actuator model. Automated Animal Board for Positioning in Ocular Photography and Imaging. Dhaval Desai 1 , Nathan Kleinhans 1 , Holly Liske 1 , Laura Piechura 1 , Kellen Sheedy 1 Advisor: Professor Wally Block, PhD 1,2 ; Client: B’Ann Gabelt 3

E N D
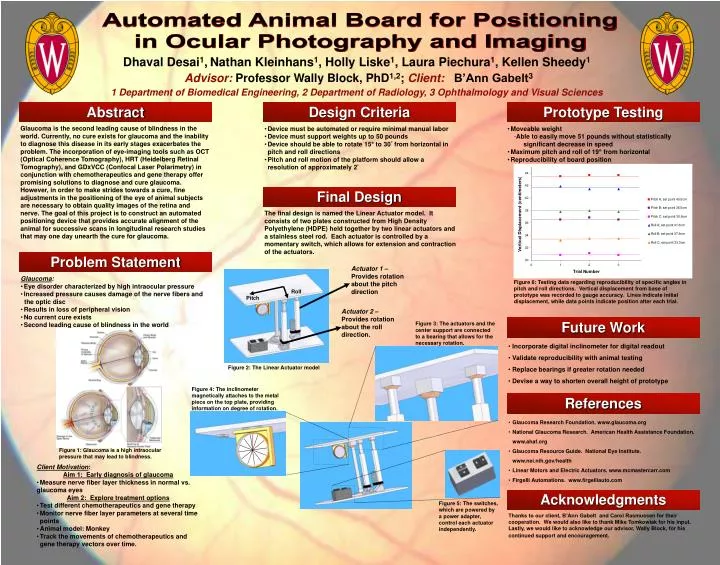
Figure 2: The Linear Actuator model Automated Animal Board for Positioning in Ocular Photography and Imaging Dhaval Desai1,Nathan Kleinhans1, Holly Liske1, Laura Piechura1, Kellen Sheedy1 Advisor:Professor Wally Block, PhD1,2; Client:B’Ann Gabelt3 1 Department of Biomedical Engineering, 2 Department of Radiology, 3 Ophthalmology and Visual Sciences Abstract Design Criteria Prototype Testing Glaucoma is the second leading cause of blindness in the world. Currently, no cure exists for glaucoma and the inability to diagnose this disease in its early stages exacerbates the problem. The incorporation of eye-imaging tools such as OCT (Optical Coherence Tomography), HRT (Heidelberg Retinal Tomography), and GDxVCC (Confocal Laser Polarimetry) in conjunction with chemotherapeutics and gene therapy offer promising solutions to diagnose and cure glaucoma. However, in order to make strides towards a cure, fine adjustments in the positioning of the eye of animal subjects are necessary to obtain quality images of the retina and nerve. The goal of this project is to construct an automated positioning device that provides accurate alignment of the animal for successive scans in longitudinal research studies that may one day unearth the cure for glaucoma. • Device must be automated or require minimal manual labor • Device must support weights up to 50 pounds • Device should be able to rotate 15° to 30° from horizontal in pitch and roll directions • Pitch and roll motion of the platform should allow a resolution of approximately 2° • Moveable weight • Able to easily move 51 pounds without statistically significant decrease in speed • Maximum pitch and roll of 19° from horizontal • Reproducibility of board position Final Design The final design is named the Linear Actuator model. It consists of two plates constructed from High Density Polyethylene (HDPE) held together by two linear actuators and a stainless steel rod. Each actuator is controlled by a momentary switch, which allows for extension and contraction of the actuators. Problem Statement Actuator 1 – Provides rotation about the pitch direction • Glaucoma: • Eye disorder characterized by high intraocular pressure • Increased pressure causes damage of the nerve fibers and • the optic disc • Results in loss of peripheral vision • No current cure exists • Second leading cause of blindness in the world Figure 6: Testing data regarding reproducibility of specific angles in pitch and roll directions. Vertical displacement from base of prototype was recorded to gauge accuracy. Lines indicate initial displacement, while data points indicate position after each trial. Roll Pitch Actuator 2 – Provides rotation about the roll direction. Future Work Figure 3: The actuators and the center support are connected to a bearing that allows for the necessary rotation. • Incorporate digital inclinometer for digital readout • Validate reproducibility with animal testing • Replace bearings if greater rotation needed • Devise a way to shorten overall height of prototype Figure 4: The inclinometer magnetically attaches to the metal piece on the top plate, providing information on degree of rotation. References • Glaucoma Research Foundation. www.glaucoma.org • National Glaucoma Research. American Health Assistance Foundation. www.ahaf.org • Glaucoma Resource Guide. National Eye Institute. www.nei.nih.gov/health • Linear Motors and Electric Actuators. www.mcmastercarr.com • Firgelli Automations. www.firgelliauto.com Figure 1: Glaucoma is a high intraocular pressure that may lead to blindness. • Client Motivation: • Aim 1: Early diagnosis of glaucoma • Measure nerve fiber layer thickness in normal vs. • glaucoma eyes • Aim 2: Explore treatment options • Test different chemotherapeutics and gene therapy • Monitor nerve fiber layer parameters at several time points • Animal model: Monkey • Track the movements of chemotherapeutics and gene therapy vectors over time. Acknowledgments Figure 5: The switches, which are powered by a power adapter, control each actuator independently. Thanks to our client, B’Ann Gabelt and Carol Rasmussen for their cooperation. We would also like to thank Mike Tomkowiak for his input. Lastly, we would like to acknowledge our advisor, Wally Block, for his continued support and encouragement.