Download
1 / 22
220 likes | 336 Views
Software Framework for Teleoperated Vehicles. Team Eye-Create ECE 4007 L01 Karishma Jiva Ali Benquassmi Safayet Ahmed Armaghan Mahmud Khin Lay Nwe. Overview. Software to control and communicate with TGVs Customizable software needed Customers with robotic vehicles

E N D
Software Framework for Teleoperated Vehicles Team Eye-Create ECE 4007 L01 Karishma Jiva Ali Benquassmi Safayet Ahmed Armaghan Mahmud Khin Lay Nwe
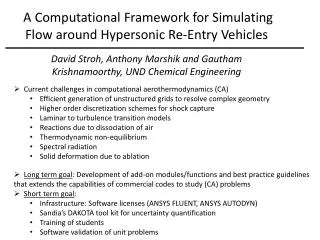
Overview • Software to control and communicate with TGVs • Customizable software needed • Customers with robotic vehicles • $42,140 development cost of test platform
Design Objectives • Flexible modular software architecture • Communication and control over wireless network • Sensors and video feedback
Open Interface • Protocol to communicate with iRobot • Commands made of opcode and parameters • Protocol does not implement any hand shaking • RS-232 Serial Interface
Robot End Software Executive Program Communication Library Controlled Robot API TCP/IP Sensors Motion Control Serial Communication USB TCP/IP iRobot Create
Robot End Software GPS Receiver Temperature Sensor Sensors Layer USB Some Other Sensor
Address relay node LAWN Robot End Control End Network Configuration of Test Platform
Boundary Preserving Protocol TCP does not preserve message boundaries BPP provides message boundary abstraction
Address Relay Protocol Problem: - DHCP assigns client, server arbitrary addresses - Client needs server address to initiate communication Solution: - Third node with static address- Node relays address between server, client
Server Address Relay Client request Server’s IPV4 address Server not registered request Server’s IPV4 address Address Relay Protocol Message formats Request: single ascii character “r” sent by client Server not registered:4 bytes representing address 255.255.255.255 Server’s IPV4 address:Server’s 4 byte IP address in network byte order
Remote Access Protocol • Remotely access different robot functions e.g. wheel velocity • Transfer sensor data back to the control interface
Description of Video Transfer Protocol To be determined • Should • transfer video frames of sufficient quality • minimize delay in transfer of frames • preserve order of frames • May use UDP to transmit frames
Development Tools & Environment • Language: C, C++ • Compiler: GCC, MS C++ compiler • OS: Windows CE, Linux • Other Tools: Qt library, MS Visual Studio
Future Work • Code higher layers in robot end software • Complete coding communication library • Complete GUI development at control interface • Integrate all systems and test on LAWN
Quote My work is a game, a very serious game. M. C. Escher (1898 - 1972)