Download
1 / 30
330 likes | 756 Views
Mesh Data Structure. Meshes. Corners ⊆ V x F Half-edges ⊆ E x F. Mesh: straight-line graph embedded in R 3. Boundary edge: adjacent to 1 face Regular edge: adjacent to 2 faces Singular edge: adjacent to >2 faces. Closed mesh: mesh with no boundary edges

E N D
Meshes Corners ⊆ V x F Half-edges ⊆ E x F Mesh: straight-line graph embedded in R3 Boundary edge: adjacent to 1 face Regular edge: adjacent to 2 faces Singular edge: adjacent to >2 faces Closed mesh: mesh with no boundary edges Manifold mesh: mesh with no singular edges
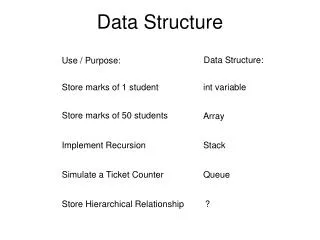
Data Structures • What should be stored? • Geometry: 3D coordinates • Connectivity • Adjacency relationships • Attributes • e.g. normal, color, texture coordinate • Per vertex, per face, per edge, per corner
Data Structures • What should it support? • Rendering • Geometry queries • What are the vertices of face #2? • Is vertex A adjacent to vertex H ? • Which faces are adjacent to face #1? • Modifications • Remove/add a vertex/face • Vertex split, edge collapse
Data Structures • How good is a data structure? • Time to construct (preprocessing) • Time to answer a query • Time to perform an operation • Space complexity • Redundancy
Mesh Data Structures • Adjacency-blind schemes • Independent faces • Shared vertex • Adjacency-aware schemes • Adjacency lists • Face based connectivity • Edge based connectivity • Half edge • Adjacency matrix • Corner table
Independent Faces • Pros • Simple • STL file • Cons • No connectivity not for topological queries • Redundancy
Shared Vertex • Pros • Convenient and efficient (memory wise) • Can represent non-manifold meshes • Cons • Too simple - not enough information on relations between vertices & faces
Shared Vertex • What are the vertices of face f1? • O(1) – first triplet from face list
Shared Vertex • What are the one-ring neighbors of v3? • Requires a full pass over all faces
Shared Vertex • Are vertices v1 and v5 adjacent? • Requires a full pass over all faces
Complete Adjacency Lists • Store all vertex, edge, and face adjacencies • Efficient topology traversal • Extra storage
Partial Adjacency Lists • Can we store only some adjacency relationships and derive others?
Face Based Connectivity • Manifold triangular meshes • Vertex • Position • 1 adjacent face index • Face • 3 vertex indices • 3 neighboring face indices • Pros • most adjacency queries in O(1) time • Cons • No (explicit) edge information
Edge Based Connectivity(Winged Edge) • Vertex • Position • 1 adjacent edge index • Edge • 2 vertex indices • 2 neighboring face indices • 4 edges • Face • 1 edge index
Edge Based Connectivity(Winged Edge) • Example
Edge Based Connectivity(Winged Edge) • Pros • Most adjacencies in O(1) time • Arbitrary polygons • Cons • No edge orientation information
Half Edge • Vertex record: • Coordinates • Pointer to one half-edge that has v as its origin • Face record: • Pointer to one half-edge on its boundary • Half-edge record: • Pointer to its origin, origin(e) • Pointer to its twin half-edge, twin(e) • Pointer to the face it bounds, IncidentFace(e) (face lies to left of e when traversed from origin to destination) • Next and previous edge on boundary of IncidentFace(e)
Half Edge • Operations supported • Walk around boundary of given face • Visit all edges incident to vertex v • Queries • Most queries are O(1)
Half Edge • Example
Half Edge • Example (cont.)
Half Edge • Pros • Most adjacency queries in O(1) time • Local operations are O(1) (usually) • Cons • Represents only manifold meshes
Adjacency Matrix • View mesh as connected graph • Given n vertices build n*n matrix of adjacency information • Entry (i,j) is TRUE if vertices i and j are adjacent • Geometric info – list of vertex coordinates • Add faces - list of triplets of vertex indices(v1,v2,v3)
Adjacency Matrix • Example
Adjacency Matrix • Symmetric for undirected simple graphs • (An)ij= # paths of length n from vi to vj • Pros • Information on vertices adjacency • Stores non-manifold meshes • Cons • Connects faces to their vertices, BUT NO connection between vertex and its face • How to find the 1-ring neighboring faces for a vertex?
Corner Table Corner: Coupling of vertex with one of its incident triangles • Corner c contains • Triangle – c.t • Vertex – c.v • Next corner in c.t (ccw) – c.n • Previous corner – c.p (==c.n.n) • Corner opposite c – c.o • E edge opposite c – not incident on c.v • c.o couples triangle T adjacent to c.t across E with vertex of T not incident on E • Right corner – c.r – corner opposite c.n (==c.n.o) • Left corner – c.l (== c.p.o == c.n.n.o)
Corner Table • Store • Corner table • For each vertex – a list of all its corners • Corner number j*3-2, j*3-1 and j*3 matchface number j ( j = 1, 2, … ) • No need for explicit face storage
Corner Table • Example
Corner Table • Pros • Topological queries in O(1) time • Most operations are O(1) • Convenient for rendering (triangle fans) • Cons • Only triangular, manifold meshes • Redundancy (but not too high)
Quiz • For each of the above data structure • What are the vertices of face fi? • What is the 1-ring neighbors (vertices/edges/faces) of vertex vi ? • Are vertices vi and vjadjacent? • 1-ring neighbor loop traversal as shown on the right, if half edge is used.