Download
1 / 31
310 likes | 486 Views
Fundamentals of closed loop wave-front control M. Le Louarn ESO Many thanks to E. Fedrigo for his help !. Introduction. Atmospheric turbulence: structure & temporal evolution AO control and why a closed loop ? Optimal modal control & AO temporal model A real world example: MACAO

E N D
Fundamentals of closed loop wave-front control M. Le Louarn ESO Many thanks to E. Fedrigo for his help !
Introduction • Atmospheric turbulence: structure & temporal evolution • AO control and why a closed loop ? • Optimal modal control & AO temporal model • A real world example: MACAO • Advanced concepts: Predictive control, MCAO et al. • Future directions
Temporal evolution of atmospheric turbulence • Model phase perturbations as thin turbulence layers • Temporal evolution: only shift of screens, i.e. assume frozen flow (“Taylor hypothesis”) • There is experimental evidence for this: • Gendron & Léna, 1996 • Schöck & Spillar, 2000 • Idea: predict WFS measurements, if wind speed & direction are known/measured • But, when there are several layer, things get complicated
AO and atmospheric turbulence • AO must be fast enough to follow turbulence evolution • Greenwood & Fried (1976), Greenwood (1977), Tyler 1994 BW requirements for AO Greenwood frequency fG~10-30 Hz at 0.5 um t0» 3-6 ms at 0.5 um Correlation time
photon noise+ read-out noise+ aliasing+ fitting+ temporal delay Errors in AO gather enough photons to reduce measurement noise read the detector compute the DM commands ® atmosphere has evolved between measurement and command ® temporal delay error: t : delay between the beginning of the measurement and the actuation of the DM t0 : atmospheric correlation time Rousset 94, Parenti & Sasiela 94
Why closed loop ? • There is a good reconstruction algo (=get the right answer in 1 iteration). • Hardware issues: • DM hysteresis (i.e. don’t know accurately what shape DM has) • WFS dynamic range: much reduced if need only to measure residuals.E.g. on SH, Open loop requires more pixels more noise • WFS linearity range : for some WFSs, this is critical: SH with quad-cell, Curvature WFS… • Closed loop hides calibration / non-linearity problems • Closed loop statistics harder to model • PSF reconstruction gets harder • Loop optimization harder
Interaction matrix in (MC)AO • Move one actuator on the deformable mirror • response DM influence function • Propagate this DM shape to the conjugation height of the WFS (usually ground) • measure of the response current WFS ( b ) • store b in the interaction matrix (M) • as many rows as measurements and columns as actuators • Invert that matrix (+ filter some modes) command matrix: M+ (LS estimate) • command vector c of the DM :
Optimizing control matrix • Problem: previous method doesn’t know anything about: • Atmospheric turbulence power spectrum A priori knowledge • MAP • Minumum variance methods (e.g. Ellerbroek 1994) • […] • Guide star magnitude • Temporal evolution (turbulent speed, system bandwidth) • See talks by Marcos van Dam & J.M. Conan
A word on modal control • The previously generated command matrix controls “mirror modes” • Some filtering is usually required (there are ill conditioned modes) • Strategy: filter out “unlikely” modes • Project system control space on some orthogonal polynomials, like: • Zernike polynomials • KL-polynomials • […] • Use atmospheric knowledge to guess which of those modes are not likely to appear in the atmosphere (see talk by J.-M. Conan)
Optimized modal control • Must evaluate S/N of measurements and include it in command matrix • Gendron & Léna (1994, 1995) • Ellerbroek et al., 1994 • Idea: low order modes should have better S/N because they have lower spatial frequencies • E.g. Tip-tilt has a lot of signal (measured over a large pupil) • High orders need more integration time to get enough signal. • Compute, for each corrected mode, the optimal bandwidth: allows in effect to change integration time • Need to estimate • Noise variance (at first in open loop) • PSD of mode fluctuations • Sys transfer fn • Include these gains in the command matrix:
Requirements • We need to: • Identify delays in the system • Model system’s transfer function • Measure the measurement noise in the WFS • Atmospheric noise
Major AO delay sources • Integration time: need to get photons • CCD read-out time ~ integration time • WFS measurement processing: • Flat-fielding • Thresholding • CCD de-scrambling • Matrix multiplication • Actuation (time between sending command and new DM shape) • NOTE: some of these operation can be (and are) pipelined to increase performance ~4ms ~1ms
MACAO Control Loop Model Corrected Wavefront Digital System + WFS RTC DAC HVA DM Aberrated Wavefront - WFS: integrator from t to t+T RTC: computational delay + digital controller DAC: zero-order holder HVA: low-pass filter, all pass inside our bandwidth DM: low-pass filter, all pass inside our bandwidth (first approximation) System frequency: 350 Hz T = 2.86ms τ = 0.5 ms HVA bandwidth: 3Khz DM first resonance: 200 Hz E. Fedrigo
AO open loop transfer function • H(s): Open loop transfert function • C(s): Compensator’s continuous transfer function (usually ~integral…) • T: Integration time (= sampling period (+ read-out)) • t: Pure delay • Simplistic model (continuous, not all errors…), can of course be improved
Noise estimation • It is possible to compute (Gendron & Léna 1994): Residual error on a mode Noise error Bandwidth error
Noise estimation • It is possible to compute (Gendron & Léna, 1994):where :0(g): residual phase error on a mode (for a mode)g: modal gain for mode (« BW), Fe: sampling freqHcor(f,g): correction transfer functionT(f): PSD of fluctuations due to turbulenceB(f): PSD of noise propagated on modeb0: average level of B(f): Hn: transfer fn white noise input noise output on mirror mode controls.
Measuring the noise variance Gendron & Lena 1994
Optimized modal control Gendron & Lena 1994 Correction BW not very sensitive to b0 estimate
Optimized modal control High order modes have less BW than low order modes Gendron & Lena 1994
Closed loop optimization • Problems: • noise estimation+transfer function model need (too) good accuracy • Turbulence is evolving rapidly must adapt gains • Non linearity problems in WFS possible (e.g. curvature) • Rigaut, 1993: Use closed-loop data as well (PUEO) • Dessenne et al 1998: • Minimization of residuals of WFS error • Reconstruction of open loop data from CL measurements • Algorithm must be quick to follow turbulence evolution (few minutes) • Iterative process: initial gain “guess” (from simulation) improved with closed-loop data, by minimizing WFE estimate.
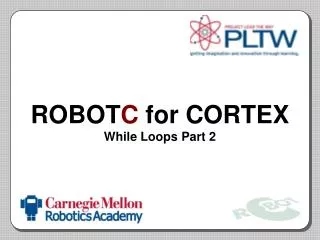
An example AO system: MACAO Multi Application Curvature Adaptive Optics system • 60 elements Curvature System (vibrating membrane, radial geometry micro-lenses, Bimorph Deformable Mirror and Tip-Tilt mount) • 2.1 kHz sampling, controlled 350 Hz, expected bandwidth ~50 Hz • Real Time Software running a PowerPC 400 MHz Real Time Computer • WaveFrontSensor detector: APD coupled with optical fibers no significant RON, or read-out time • Modular approach (4 VLTI units+SINFONI/CRIRES+spares) • Strap quadrant detector tip-tilt sensor+ TCCD (VLTI)
A real system: MACAO Telescope Control Corrected Wavefront Guide Probe M2 1Hz ATM+TEL CWFS DM Adaptive Control TTM 350Hz Low Pass 5Hz Low Pass 1Hz E. Fedrigo
LGS Control Telescope Control Airmass LGS Defocus Corrected Wavefront Guide Probe M2 LowPass Trombone 1Hz ATM+TEL CWFS DM Adaptive Control TTM 500Hz 0.03Hz Low Pass 5Hz LowPass E. Fedrigo 1Hz
System Bandwidth Measured Close-Loop Error Transfer Function (0.45” seeing in V) Plots: courtesy of Liviu Ivanescu, ESO
Predictive & more elaborate control • How to improve control BW ? • Turbulence is predictable • Schwarz, Baum & Ribak, 1994 • Aitken & McGaughey, 1996 • Several approaches (at least): • Madec et al., 1991, Smith compensator : takes lag into account • Paschall & Anderson, 1993 : Kalman filtering : see talk by Don Gavel • Wild, 1996 : cross covariance matrices • Dessenne, Madec, Rousset 1997: predictive control law • There is a performance increase in BW limited system • Layers are not separated, so “hard job” • Unfortunately, gain seems small for current single GS AO systems. • Static aberrations need to be taken into account: residual mode error 0 • Telescope vibrations need special attention
Predictive control Dessenne, Madec, Rousset, 1999
MCAO / GLAO • General case of AO, Several WFSs, several DMs Observation / optimization direction Measurement Direction 1 Measurement Direction 2 Challenge:find clever ways to work in closed loop ! Are the sensors always seeing the correction ?
The future • MCAO • Allow better temporal predictability if layers are separated • Control of several DMs, WFSs, possibly in “open loop” • ELTs / ExAO: fast reconstructors, because MVM grows quickly w/ number of actuators • FFT-based • Sparse matrix • […] • predictive methods to the rescue !? • Segmentation • Algorithms investigated to use AO WFS info to co-phase segmented telescopes • Kalman filtering • Optimize correction in closed loop, reliable noise estimates, complex systems • Applicable to MCAO