Download
1 / 16
160 likes | 359 Views
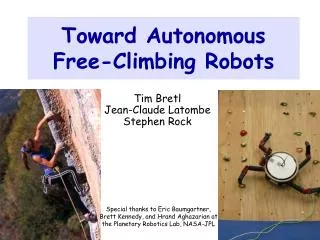
Multi-Step Motion Planning for Free-Climbing Robots. Tim Bretl , Sanjay Lall , Jean-Claude Latombe , Stephen Rock Presenter: You-Wei Cheah. The Climbing Problem . Goal: Enable multi-limbed robots to free-climb vertical rock Applications: search and rescue cave exploration

E N D
Multi-Step Motion Planning for Free-Climbing Robots Tim Bretl, Sanjay Lall, Jean-Claude Latombe, Stephen Rock Presenter: You-Wei Cheah
The Climbing Problem • Goal: Enable multi-limbed robots to free-climb vertical rock • Applications: • search and rescue • cave exploration • human assistance in rock and mountain climbing
Probabilities-Roadmap (PRM) motion planning • Widely used for path planning through high-dimensional configuration spaces with multiple constraints • Can construct feasible paths quickly • Lacks a formal stopping criterion • Question: How much time to spent on query?
LEMUR IIb • Consists of 4 identical limbs attached to a circular chasis • Total mass: 7kg • Each limb has 3 revote joins DOF’s: • 2 in-plane (yaw) • 1 out-of plane (pitch)
Model • Configurations are defined by 15 parameters: • the position/orientation (xp, yp, θp) of the pelvis • the joint angles (θ1, θ2, θ3) of each limb. • Holds lie oninclined plane are defined by • a 2-D point (xi, yi) • a 3-D point (vi)
Model • Friction modeled using Coulomb’s law • LEMUR IIb maintains 3-hold and 4-hold stances while climbing • Set of supporting holds is a stance, denoted σ • Robot’s continuous motion with 4 supporting holds occurs on a 3-D manifold Cσ4 • 3 supporting holds, motion occurs on a 6-D manifold Cσ3 • four additional constraints: quasi-static equilibrium, joint angle limits, joint torque limits, and (self-)collision
Climbing motion • Switch between 3-hold and 4-hold stances • σ3 and σ4 are adjacent if σ4 = σ3 ∪ {i} for some holdi • Robot can only switched between adjacent stances σ and σ’ at points qt ∈ Fσ ∩ Fσ′ • If continuous path connecting qs to a transition point exists in that component, then reachable
One-step climbing algorithm • Tries to build a path from some qsto a goal qg • Sample uniformly at random the goal region for a goal configuration • Build a PRM in the space of configurations that are collision free and satisfy the equilibrium test
Multi-step Planning • Given a stance σ, a start configuration qs ∈ Fσ, and a goal hold g: • construct a sequence of one-step motions that will bring the robot to a stance σg that contains g. • Graph search problem • Nodes in the graph are components of feasible spaces and not particular configurations
Performance Analysis • One-step planning • Most one-step moves were planned quickly • Difficult moves took more time • Multi-step planning • Total planning time approaches linear growth
Proposed modifications • Given each one-step motion query, run for a short length of time • Attempt to prove the motion is infeasible if a solution is not found • If disconnection proof is not found, allow planner to run for an additional Tmax
Proving one-step disconnection • Assumption: the feasible space Fσ can be represented as a semialgebraicset • Fnd a polynomial function g ∈ R[x1, … , xn] such that g(qs) > 0, g(qg) < 0, and Pcut(g) is empty:
Future work • Robot will have to plan based on locally sensed information that is incomplete or uncertain • Advances in computational algebra might be able to produce practical algorithms for proving disconnections