Download
1 / 7
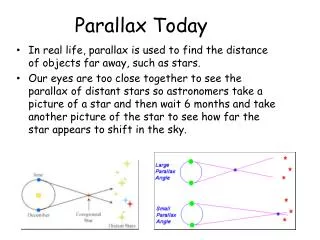
70 likes | 294 Views
living with the lab. Estimating the Efficiency of a Parallax Servo. living with the lab. Calculating Servo Efficiency. Energy to Lift Weight. We know that energy is lost due to friction in the gearbox and that “ losses” occur in the electric motor .

E N D
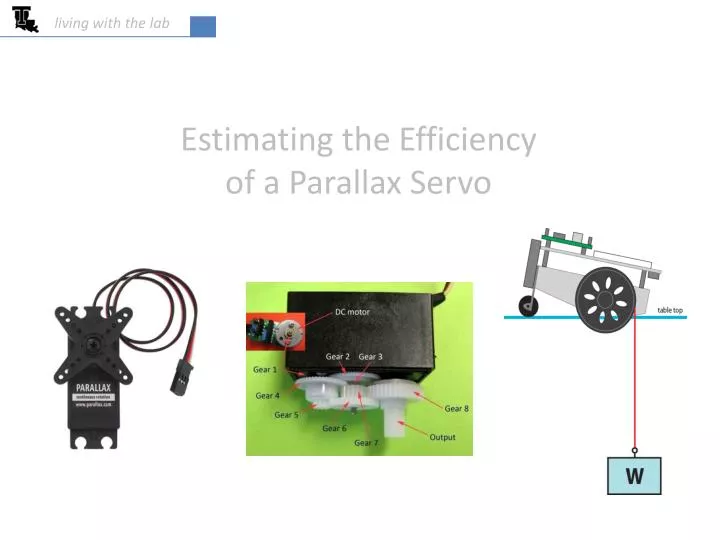
living with the lab Estimating the Efficiencyof a Parallax Servo
living with the lab Calculating Servo Efficiency Energy to Lift Weight We know that energy is lost due to friction in the gearbox and that “losses” occur in the electric motor. The overall efficiency of the systemis . . . electrical energy used is determined the same way as for pump project
living with the lab Making a Pulley from a Wheel wheel is grooved using a lathe original wheel hole drilled through wheel for attaching lifting string (fishing line) 3
living with the lab Servo Efficiency Assignment • Wrap fishing line around a grooved wheel, and attach a weight to the end of the line • Turn on your servo to lift a weight • Use five different servo speeds during lifting: • servo pulse width=1500s for no servo motion • servo pulse width=1700s for full speed counterclockwise • choose five values between 1500s and 1700s • Measure the vertical distance traveled by the weight • Use the millis() command to determine the time elapsed during lifting (print to serial monitor) • Compute efficiency
living with the lab Spreadsheet for Computing Efficiency Create the following plots: “Potential energy change of the weight” and “electrical energy input” (both on y-axis) versus “pulse width.” Be sure to label each of these curves on your plots. “System efficiency” versus “pulse width.”
living with the lab Recommendations • Secure your robot in a vise or at your table (take one wheel off the robot and let the pulley wheel hang over the edge of the table, holding the robot during lifting. • Measure the weight of an object to lift (cell phone, several sets of keys, purse), and attach the weight to the end of the fishing line provided. • Write a Arduino sketch that allows servo speed to be controlledand wheel motion to be activated using the robot whiskers. • Measure voltage and current for different servo speeds; you will need two multimeters. tie fishing line to pulley
living with the lab Please return the pulley to your instructor, and clean up any messes that you made. 7