Download
1 / 9
90 likes | 325 Views
Autonomous Surface Vehicle. Team Leader: Stanton Coffey Team Members: Pat Gray, Jack Nagle, Sam Riahi , Matt Cline Faculty Adviser: Dr. Gene Hou ME Graduate Assistant: Justin Selfridge ECE Graduate Assistant: Loc Tran ME Undergraduate Assistant: Jeff Roper

E N D
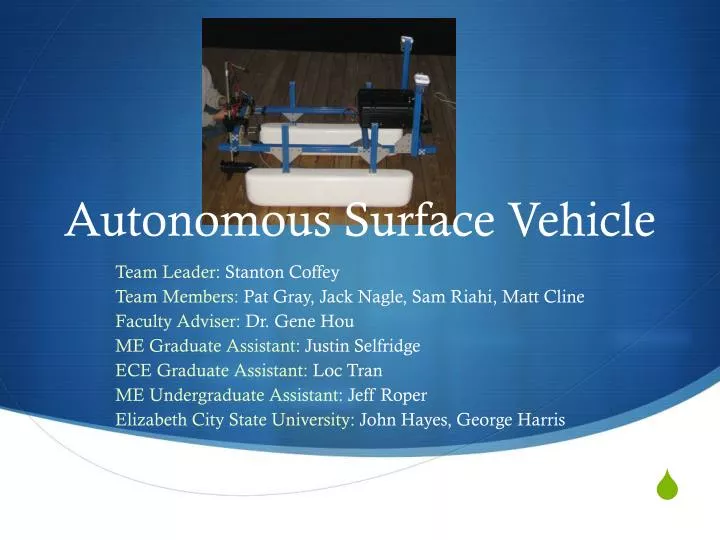
Autonomous Surface Vehicle Team Leader: Stanton Coffey Team Members: Pat Gray, Jack Nagle, Sam Riahi, Matt Cline Faculty Adviser: Dr. Gene Hou ME Graduate Assistant: Justin Selfridge ECE Graduate Assistant: LocTran ME Undergraduate Assistant: Jeff Roper Elizabeth City State University: John Hayes, George Harris
Purpose • To enter into an international competition against other universities. We must build an autonomous unmanned boat to navigate a course and complete sub-mission tasks. Within certain guidelines • Above water (not sub-marine) • Must weigh < 140 lbs • Within dimensions 6’ x 3’ x 3’
Main Mission Tasks&Sub-mission Tasks • Main Mission Tasks • Strength Test • Speed Test • Maneuvering Test • Sub-Mission Tasks • Amphibious landing • Find the fire and extinguish it • Find and report the hot target • Turn off the waterfall
Previous Work (last semester) • Boat frame construction • Modular Design, Movable Components • Motors Design • 2 Motors (optimal thrust, easy maneuvering) • Pontoons • 2 Pontoons for maximum stability • Electrical Box • Battery choice, box components • Camera Mounting
Current Work Water Testing
Current Work(Cont.) Water Testing
Current Problems • Electrical Box • Not water proof, incorrectly rated fuses, poor wiring (wires slip off) • Frame / Motors • Frame poorly measured (needs to be squared) • Motors not securely locked (are able to rotate while running) • Pontoons • Current pontoons give barely enough buoyancy and there is still weight to be added.
To Do List • Lock Motors in place • Fix Wiring • Make a cart to transport the boat and to lower the boat into the water (required by competition) • Water proof electrical box • Test GPS and Compass • Test Kinect Cameras