Download
1 / 1
10 likes | 219 Views
Multi Agent Simulation and its optimization over parallel architecture using CUDA™. PARALLEL DESIGN MODEL. Human Behaviors. Internal Advisor: Shahab Tahzeeb External Advisor: Ali Zaidi. OpenSteer. Abdur Rahman and Bilal Khan NEDUET(Department Of Computer and Information Systems). CPU Code.

E N D
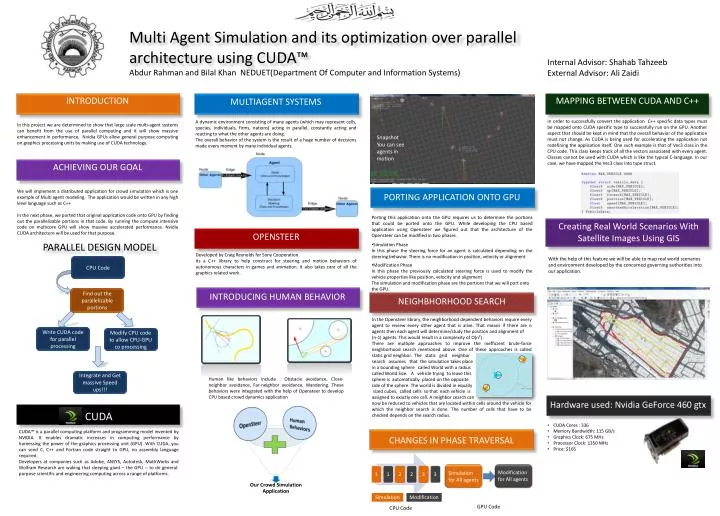
Multi Agent Simulation and its optimization over parallel architecture using CUDA™ PARALLEL DESIGN MODEL Human Behaviors Internal Advisor: Shahab Tahzeeb External Advisor: Ali Zaidi OpenSteer Abdur Rahman and Bilal Khan NEDUET(Department Of Computer and Information Systems) CPU Code INTRODUCTION In this project we are determined to show that large scale multi-agent systems can benefit from the use of parallel computing and it will show massive enhancement in performance. Nvidia GPUs allow general purpose computing on graphics processing units by making use of CUDA technology. MAPPING BETWEEN CUDA AND C++ In order to successfully convert the application C++ specific data types must be mapped onto CUDA specific type to successfully run on the GPU. Another aspect that should be kept in mind that the overall behavior of the application must not change. As CUDA is being used for accelerating the application not redefining the application itself. One such example is that of Vec3 class in the CPU code. This class keeps track of all the vectors associated with every agent. Classes cannot be used with CUDA which is like the typical C-language. In our case, we have mapped the Vec3 class into type struct. MULTIAGENT SYSTEMS A dynamic environment consisting of many agents (which may represent cells, species, individuals, firms, nations) acting in parallel, constantly acting and reacting to what the other agents are doing. The overall behavior of the system is the result of a huge number of decisions made every moment by many individual agents. Snapshot You can see agents in motion Find out the parallelizable portions Simulation Modification ACHIEVING OUR GOAL We will implement a distributed application for crowd simulation which is one example of Multi agent modeling. The application would be written in any high level language such as C++ In the next phase, we ported that original application code onto GPU by finding out the parallelizable portions in that code. By running the compute intensive code on multicore GPU will show massive accelerated performance. Nvidia CUDA architecture will be used for that purpose. • PORTING APPLICATION ONTO GPU • Porting this application onto the GPU requires us to determine the portions that could be ported onto the GPU. While developing the CPU based application using Opensteer we figured out that the architecture of the Opensteer can be modified in two phases. • Simulation Phase • In this phase the steering force for an agent is calculated depending on the steering behavior. There is no modification in position, velocity or alignment • Modification Phase • In this phase the previously calculated steering force is used to modify the vehicle properties like position, velocity and alignment • The simulation and modification phase are the portions that we will port onto the GPU. Creating Real World Scenarios With Satellite Images Using GIS With the help of this feature we will be able to map real world scenarios and environment developed by the concerned governing authorities into our application. NEIGHBHORHOOD SEARCH In the Opensteer library, the neighborhood dependent behaviors require every agent to review every other agent that is alive. That means if there are n agents then each agent will determine/study the position and alignment of (n-1) agents. This would result in a complexity of O(n²) . There are multiple approaches to improve the inefficient brute-force neighborhood search mentioned above. One of these approaches is called static grid neighbor. The static grid neighbor search assumes that the simulation takes place in a bounding sphere called World with a radius called World Size. A vehicle trying to leave this sphere is automatically placed on the opposite side of the sphere. The world is divided in equally sized cubes, called cells so that each vehicle is assigned to exactly one cell. A neighbor search can now be reduced to vehicles that are located within cells around the vehicle for which the neighbor search is done. The number of cells that have to be checked depends on the search radius. Write CUDA code for parallel processing Modify CPU code to allow CPU-GPU co processing OPENSTEER Developed by Craig Reynolds for Sony Cooperation Its a C++ library to help construct for steering and motion behaviors of autonomous characters in games and animation. It also takes care of all the graphics related work. INTRODUCING HUMAN BEHAVIOR Integrate and Get massive Speed ups!!! • Hardware used: Nvidia GeForce 460 gtx • CUDA Cores : 336 • Memory Bandwidth: 115 GB/s • Graphics Clock: 675 MHz • Processor Clock: 1350 MHz • Price: $165 Human like behaviors include : Obstacle avoidance, Close-neighbor avoidance, Far-neighbor avoidance, Wandering. These behaviors were integrated with the help of Opensteer to develop CPU based crowd dynamics application CUDA CUDA™ is a parallel computing platform and programming model invented by NVIDIA. It enables dramatic increases in computing performance by harnessing the power of the graphics processing unit (GPU). With CUDA, you can send C, C++ and Fortran code straight to GPU, no assembly language required. Developers at companies such as Adobe, ANSYS, Autodesk, MathWorks and Wolfram Research are waking that sleeping giant – the GPU -- to do general-purpose scientific and engineering computing across a range of platforms. CHANGES IN PHASE TRAVERSAL Modification for All agents Simulation for All agents GPU Code CPU Code