Download
1 / 6
100 likes | 209 Views
Learn about the two main methods for modeling mechanical systems - kinematic analysis and Lagrange equation. Understand translational and rotational elements such as mass, spring, and damping. Explore energy storage and virtual work concepts in system elements. Grasp the basics of modeling mechanical systems using both translational and rotational elements.

E N D
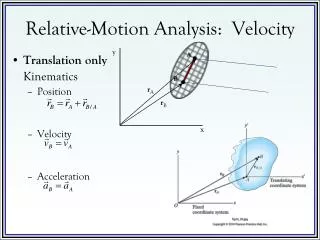
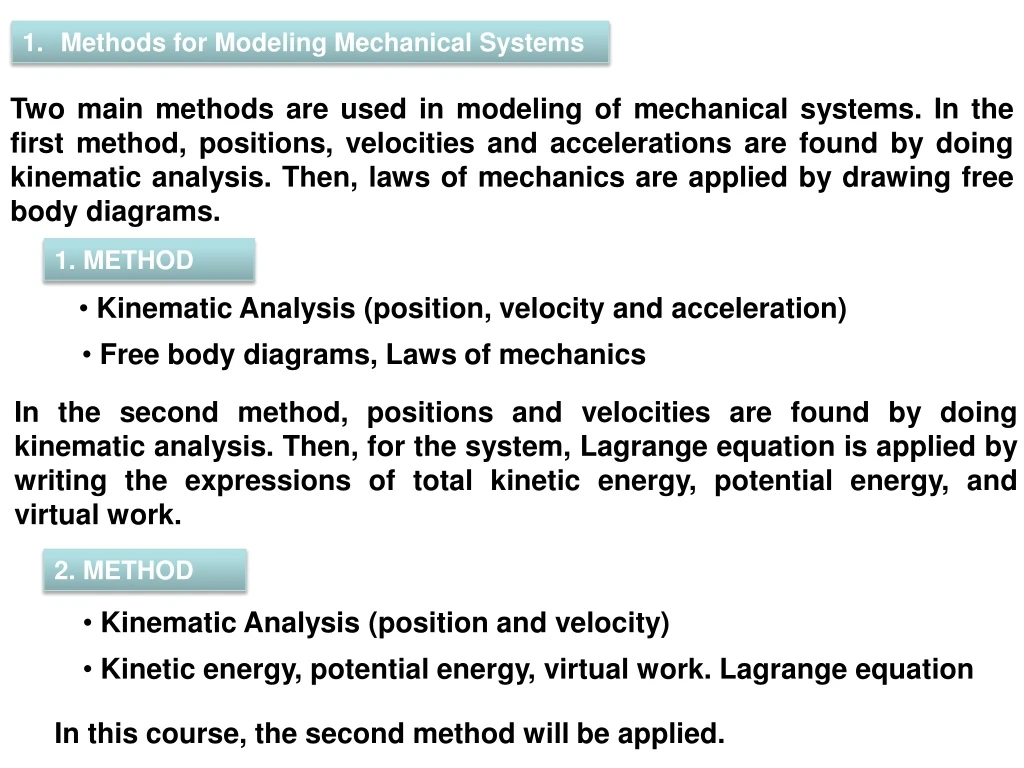
Methods for Modeling Mechanical Systems Two main methods are used in modeling of mechanical systems. In the first method, positions, velocities and accelerations are found by doing kinematic analysis. Then, laws of mechanics are applied by drawing free body diagrams. 1. METHOD • Kinematic Analysis (position, velocity and acceleration) • Free body diagrams, Laws of mechanics In the second method, positions and velocities are found by doing kinematic analysis.Then, for the system, Lagrange equation is applied by writing the expressions of total kinetic energy, potential energy, and virtual work. 2. METHOD • Kinematic Analysis (position and velocity) • Kinetic energy, potential energy, virtual work. Lagrange equation In this course, the second method will be applied.
x(t) F(t) m BASIC MECHANICAL SYSTEM ELEMENTS In mechanical systems, there are translational and rotational elements. We can model mechanical systems using translational or rotational elements or both. Let’s deal with the basic mechanical system elements. Translational Elements: Mass The first one of the translational elements is the mass of m. F is the force, which is applied to the mass. x is the displacement of the mass. F is also an element equation which equals to . E1 is the kinetic energy, which is stored in the mass of m and equals to . W is the virtual work, which is done by external forces acting on the element of m.
x(t) x(t) c k F(t) F(t) Translational Elements: Spring The second one of the translational elements is the spring with a spring constant k. F is the force, which is applied to the spring. x is the displacement of the spring. Element equation F equals kx. E2 is the potential energy, which is stored in the spring elementand equals to . Translational Elements: Damping The third one of the translational elements is the damper with a damping constant c. F is the damping force acting on the element. x is the displacement of the element. is the velocity which equals the derivative of x. Damping force equals to .
c c In this course, viscous damping is assumed for a damper element. friction velocity velocity friction Viscous friction is in opposite direction to the velocity; the magnitude of the friction force is proportional to the magnitude of the velocity. Virtual work also occurs in the damping element. The cause of the negative sign in the formula of virtual work is that the direction of frictional forces is always opposite to the direction of motion.
Rotational Elements Similar equations can be written for rotational elements too. Here, T is the moment. is the angular displacement. dot is the angular velocity. 2dot is the angular acceleration. IG is the mass moment of inertia which is resistance to a rotational motion. Kr is the torsional spring constant, Cr is the torsional damper constant. You should learn the moment of inertia of a circular thin disc having mass m, radius R which equals to mR2/2. Also, you should learn the moment of inertia of a homogenous bar having mass m and length L, which equals to mL2/12. CAD : Solid Modeling
Mass for Tranlational ve Rotational Motion : The kinetic energy of a rigid body, which performs translational and rotational motion in plane, can be written as follows. is the velocity of the body’s center of mass.