Download
1 / 8
120 likes | 1.38k Views
Introduction. A t A. A n A. A n BA. A. ω 2. α 2. O 2. B. A t BA. A BA. A. A A. O A. A s B. Acceleration Polygon for a Crank-Slider Mechanism

E N D
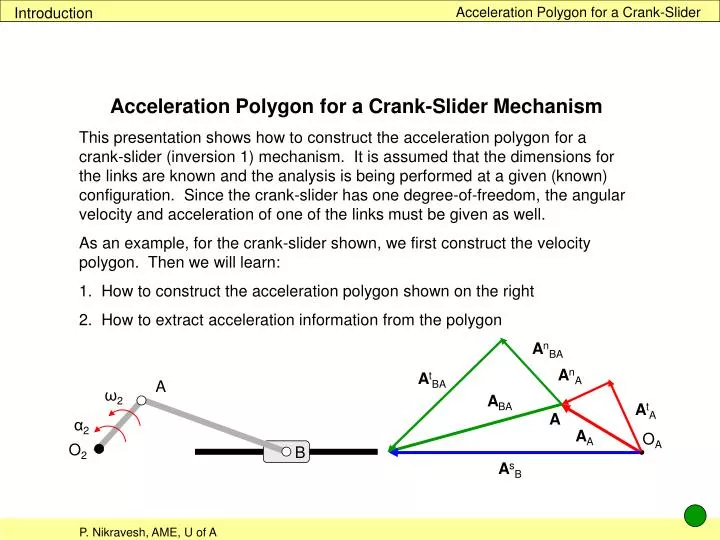
Introduction Acceleration Polygon for a Crank-Slider AtA AnA AnBA A ω2 α2 O2 B AtBA ABA A AA OA AsB Acceleration Polygon for a Crank-Slider Mechanism This presentation shows how to construct the acceleration polygon for a crank-slider (inversion 1) mechanism. It is assumed that the dimensions for the links are known and the analysis is being performed at a given (known) configuration. Since the crank-slider has one degree-of-freedom, the angular velocity and acceleration of one of the links must be given as well. As an example, for the crank-slider shown, we first construct the velocity polygon. Then we will learn: How to construct the acceleration polygon shown on the right How to extract acceleration information from the polygon
Inversion 1 Acceleration Polygon for a Crank-Slider ω2 A α2 O2 B A ω2 α2 O2 B Inversion 1 Whether the crank-slider is offset or not, the process of constructing an acceleration polygon remains the same. Therefore, in this example we consider the more general case; i.e., an offset crank-slider. As for any other system, it is assumed that all the lengths are known and the system is being analyzed at a given configuration. Furthermore, it is assumed that the angular velocity and acceleration of the crank is given.
Vector loop, differentiation Acceleration Polygon for a Crank-Slider Vector loop We define four position vectors to obtain a vector loop equation: RAO2 + RBA = RO4O2 + RBO4 The first time derivative provides the velocity loop equation: VtAO2 + VtBA = VsBO4 Or, VtA + VtBA = VsB The second time derivative provides the acceleration loop equation: AA + ABA = AB We split the acceleration vectors on the left side of the equation into normal and a tangential components and express the acceleration vector on the right side of the equation as a slip acceleration: A ► O2 RAO2 RBA RO4O2 B O4 RBO4 AtA + AnA + AtBA + AnBA = AsB We need the velocities to calculate some of the accelerations. Therefore we perform a velocity analysis first.
Velocity analysis Acceleration Polygon for a Crank-Slider Velocity analysis VtAO2 + VtBA = VsBO4 We calculate VtAO2: VtAO2 = ω2∙ RAO2 The direction is found by rotating RAO2 90° in the direction of ω2 The direction of VtBA is perpendicular to RBA and the direction of VsBO4 is parallel to RBO4 We draw the velocity polygon: We determine ω3 as: ω3 = VtBA / RBA RBA has to be rotated 90° clockwise to point in the same direction as VtBA. Therefore ω3 is clockwise and ω4 equals zero. VtAO2 A ω2 ω3 O2 RAO2 RBA RO4O2 ► B O4 RBO4 ► ► ► ► ► ► A VtBA VtAO2 B OV VsBO4 ►
Normal components Acceleration Polygon for a Crank-Slider AtA + AnA + AtBA + AnBA = AsB Normal components We first calculate the magnitude of all the normal components: AnA = ω22∙ RAO2 AnBA = ω32∙ RBA The direction of each normal component of acceleration is opposite to the corresponding position vector A ω2 ω3 O2 RAO2 RBA RO4O2 B O4 RBO4 ► A AnA O2 AnBA B
Tangential components Acceleration Polygon for a Crank-Slider AtA + AnA + AtBA + AnBA = AsB Tangential and slip components We first calculate the magnitude of AtA: AtA = α2∙ RAO2 The direction is found by rotating RAO2 90° in the direction of α2 We also know that AtBA is on an axis perpendicular to RBA Similarly we know that AsB is along the axis of RBO4 α2 A O2 RAO2 RBA RBO4 B O4 RBO4 ► AtA ► A AnA ► O2 AnBA B
Acceleration polygon Acceleration Polygon for a Crank-Slider AtA AtA AtA AnA AnA AnA AnBA AnBA AnBA AtA + AnA + AtBA + AnBA = AsB Acceleration polygon Now we are ready to draw the acceleration polygon. First we select the origin and add AtA and AnA to obtain AA AnBA is a added at A We also know the axis of AtBA which would be added to AnBA We also know the axis of AsB is added to the origin The two lines intersect at B. We complete the acceleration polygon by drawing the missing accelerations Next we determine the angular accelerations. A ► O2 ► ► B ► AtBA ► ABA A AA B OA AsB
Angular accelerations Acceleration Polygon for a Crank-Slider AtA AnA AnBA ABA A AA AsB Angular accelerations The absolute value of the angular acceleration of link 3 is computed as: α3 = AtBA∕ RBA RBA has to be rotated 90° cw to head in the direction of AtBA. Therefore α3 is cw Since the slider does not rotate, α4 is zero. This completes the acceleration analysis of this crank-slider. A α2 α3 O2 RAO2 RBA RO4O2 B O4 RBO4 ► AtBA OA






