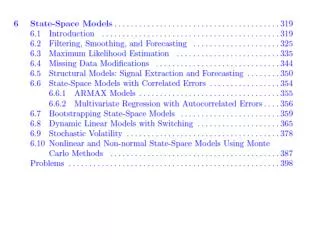
Download
1 / 5
60 likes | 151 Views
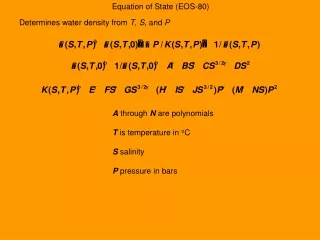
Project 3 Due date: 14 June 2012 Submit the result .m file via e-mail to jaepark@incheon.ac.kr (If they are multiple .m files, then please zip them to one file.). State-Space Equation of a Plant. Parameter uncertainty. ARE. H 2 Optimal Control. Eigen value.

E N D
Project 3Due date: 14 June 2012Submit the result .m file via e-mail to jaepark@incheon.ac.kr (If they are multiple .m files, then please zip them to one file.)
State-Space Equation of a Plant Parameter uncertainty
ARE H2 Optimal Control Eigen value
Optimal Control Problem ARE Eigen value
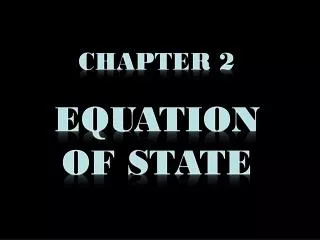
1. Design LQR compensator 1-1. Show the result LQR gain Kc 1-2. Show Eigen values of the result open-loop system. 1-3. Show Eigen values of the result closed-loop system. 1-4. Compare step response of the result closed-loop system when parameter uncertainties are and . 2. Design LQR compensator 1-1. Show the result LQR gain Kc 1-2. Show Eigen values of the result open-loop system. 1-3. Show Eigen values of the result closed-loop system. 1-4. Compare step response of the result closed-loop system when parameter uncertainties are and . Write MATLAB programs to show followings