Download
1 / 27
5.5k likes | 26.62k Views
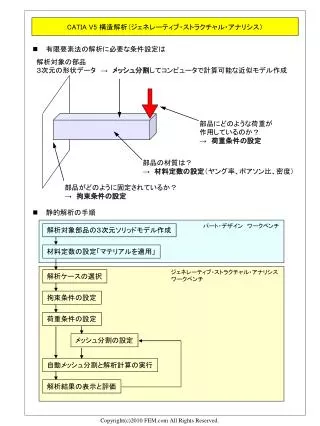
有限要素法の解析に必要な条件設定は. CATIA V5 構造解析( ジェネレーティブ・ストラクチャル・アナリシス). 解析対象の部品 3次元の形状データ → メッシュ分割 してコンピュータで計算可能な近似モデル作成. 部品にどのような荷重が 作用しているのか? → 荷重条件の設定. 部品の材質は? → 材料定数の設定 (ヤング率、ポアソン比、密度). 部品がどのように固定されているか? → 拘束条件の設定. 静的解析の手順. パート・デザイン ワークベンチ. 解析対象部品の3次元ソリッドモデル作成. 材料定数の設定「マテリアルを適用」.

E N D
有限要素法の解析に必要な条件設定は CATIA V5 構造解析(ジェネレーティブ・ストラクチャル・アナリシス) 解析対象の部品 3次元の形状データ → メッシュ分割してコンピュータで計算可能な近似モデル作成 部品にどのような荷重が作用しているのか? → 荷重条件の設定 部品の材質は? → 材料定数の設定(ヤング率、ポアソン比、密度) 部品がどのように固定されているか? → 拘束条件の設定 • 静的解析の手順 パート・デザイン ワークベンチ 解析対象部品の3次元ソリッドモデル作成 材料定数の設定「マテリアルを適用」 ジェネレーティブ・ストラクチャル・アナリシス ワークベンチ 解析ケースの選択 拘束条件の設定 荷重条件の設定 メッシュ分割の設定 自動メッシュ分割と解析計算の実行 解析結果の表示と評価
材料定数の設定 解析対象部品には、必ずマテリアルを設定する必要がある。 パート・デザインワークベンチで「マテリアルを適用」を使用。 • マテリアルライブラリへの新規登録 既存のマテリアルに適切な材質がない場合 マテリアルライブラリに登録できる。
ジェネレーティブ・ストラクチャル・アナリシス ワークベンチに切替 • 解析ケースの選択 ・応力・変形の解析 ・固有値解析 ・フリーフリーの固有値解析 • ビューパラメータをカスタマイズで解析結果のコンター図を表示可能にする チェック
拘束条件の設定(ソリッドモデルの面やエッジに対して設定)拘束条件の設定(ソリッドモデルの面やエッジに対して設定) 拘束条件は解析対象の固定状態を表現します。節点に対して拘束するかフリーにするかを自由度ごとに定義します。線形静解析においては、剛体運動(変形を伴わない形状の移動や回転運動)が生じないように拘束条件を定義する必要があります。したがって、荷重がかからない方向にも拘束条件の定義が必要です。 「クランプ」 選択された形状の全自由度を固定 「サーフェススライダ」 選択した面は、その面の垂直方向に移動・変形しない 「ユーザー定義拘束」 座標系の任意の軸方向(X・Y・Z軸に相当)の移動・変形を拘束 (チェックを入れるとその方向が拘束) 「サーフェススライダ」は下図のような対称境界面の拘束に有効 ソリッド要素の節点には回転自由度がないので、回転が拘束されていると、解析計算の最後に警告ウィンドウが表示される。 拘束条件が不十分だと、計算実行時、エラーとなる 計算中、“特異性”(計算条件の不具合など)が検出された場合、エラーメッセージが表示される。
荷重条件の設定 ソリッドモデルの面やエッジに対して設定 「圧力」 設定したFaceに対し、単位面積あたりの法線方向荷重(N/m2)を定義する。 「分布力」 座標系に従った方向の点力(N)を定義する。 「モーメント」 形状から算出される回転軸周りにねじりモーメント(N・m)を与える。 「加速度」 座標系に従った加速度荷重(m/s2)を定義する。 重力はZ軸方向に-9.8m/s2を入力 「強制変位」 「遠心力」 回転軸と角速度(turn/mn)及び角加速度(rad/s2)から遠心力定義 「温度場」 「線力密度」 Edge上に単位長さあたりの荷重(N/m)荷重を定義する。 「面力密度」 単位面積あたりの荷重(面圧力N/m2)を方向指定で定義する。 「体積力密度」 Body全体に単位体積あたりの荷重(N/m3)を定義する。 Body内部にも荷重が適用される。 「力密度」 定義面に対して等分布な荷重をトータル荷重(合力N)で定義する。 「分布力」 点または仮想パーツへ荷重定義する場合に用いる。荷重値は、トータル荷重を入力する。サポートにEdgeやFaceも選択可能ですが、荷重が面に対し均一に分散されません。結果はメッシュ分割により異なるので推奨しません。 ハンドラで荷重点を定義します。選択しない場合はサポートの重心位置が自動選択されます。 「ベアリング荷重」 円筒形状に対して座標系に従った不等分布力をトータル荷重(合力N)で定義する。 荷重の分布特性は「プロファイル」でサインカーブ又は2次曲線を選択する。
メッシュ分割の設定 • メッシュサイズ、サグと要素タイプなどの設定 ダブルクリック 部分的にメッシュサイズを指定 要素境界とモデル境界の間の 最大距離を指定 1次は精度が悪いので使用しない 計算誤差の大きい個所のメッシュを再分割して再計算
「計算」をクリックして、解析計算を実行。メッシュ分割は自動実行。「計算」をクリックして、解析計算を実行。メッシュ分割は自動実行。 • 解析ソルバーの設定 下記3手法から自動的に選択 問題規模が小さいケース 問題規模が非常に大きいケース (反復法、接触要素は不可) 問題規模が大きいケース (普通はこれでかまわない) 勾配法を使用する場合のパラメータ • 自動メッシュ分割と解析計算の実行 • 計算実行時に使用されるファイルについて ※条件を変えて再計算し、前の条件も残しておきたい場合は、これらのファイルも各条件に対応する名前にしておく。 ファイル保存時に現行ストレージの中身を消すかどうかの指示 一時ストレージは解析セッション終了時に消される
解析結果の表示 「変形」 変形状態のメッシュ分割図を表示 「Von Mises応力」 VonMises応力分布図を表示(デフォルトはコンター図表示) 「変位」 変位分布を表示(デフォルトはベクトルシンボル表示) 「主応力」 主応力分布を表示(デフォルトはベクトルシンボル表示) 「精度」 計算時のエネルギー誤差ノルムの推定値の分布を表示 誤差が比較的大きい領域の計算精度は信頼できるものではないかもしれません 変形状態のアニメーション表示 断面解析は、構造の断面で結果表示 変形図の表示倍率の設定 極大、極小値の表示 情報の表示
解析例 穴あき平板の応力解析 10 MPa 10 MPa ・材質:アルミ合金(A6061) ヤング率 68,600 MPa = 6.86×1010 N/m2 ポアソン比 0.33 ・両端面を10MPa(=1×107N/m2)の等分布荷重で引張る ・裏面全面は厚み方向に変位がない 解析は、形状および荷重条件の対称性を考慮して、図のように1/4モデルで行う 1. 1/4分割モデルをパートデザインワークベンチで作成 2. マテリアルを適用
3. [スタート]メニューから[アナリシス&シミュレーション]3. [スタート]メニューから[アナリシス&シミュレーション] [ジェネレーティブ・ストラクチャル・アナリシス]を選択。 4. 静解析を選択して、OKボタンをクリック。 5. 拘束条件を設定する。 ・「サーフェススライダ」アイコンをクリック。 ・2つの分割面と裏面を選択し、OKボタンをクリック。 • 6. 荷重条件を設定する。 • ・「圧力」アイコンをクリック。 • ・荷重を負荷する面として平板の端面を選択。 圧力として -1e7 を入力 (10MPa = 1×107 N/m2)。 圧力はソリッド内側向きがプラスで、外向きがマイナス。 7. 要素タイプは2次を使用する。 ・ツリー上の「OCTREE 四面体メッシュ.1」をダブルクリック。 ・「OCTREE四面体メッシュ」ダイアログで、要素タイプが2次であることを確認する。
8. 解析計算を実行する。 ・「計算」アイコンをクリック。 ・「すべて」を選択し、「プレビュー」のチェックを外しておく。 「プレビュー」をオンにしておくと、計算実行前に計算時間 などの見積が表示される。 ・OKボタンを押す。 自動メッシュ分割と解析計算が連続して自動実行される。 9. Mises応力を表示する。 ・「Von Mises応力」アイコンをクリック。 ・変形の状態や応力分布を確認する。 ・応力値を調べたい要素にカーソルを移動 するとダイナミックに節点での値を表示する。 • 10. 最大応力の位置をサーチする。 • ・「イメージ極値」アイコンをクリック。 • ・「極値を作成]ダイアログが表示される。 • ・デフォルト値でOKボタンをクリック。 11. 変形状況をアニメーション表示させる。 ・「アニメーション表示」アイコンをクリック。 アニメーションが再生させる。
12. 変位の分布を表示させる。 • ・「変位」アイコンをクリックして変位をベクトルで表示。 • ・仕様ツリー上の「並進変位ベクトル.1」をダブルクリックすると • 「イメージを編集」が表示される。 • ・「平均ISO」を選択すると、変位表示がコンター図に変わる。
13. 高応力部分のメッシュを細かく分割して、再計算する。13. 高応力部分のメッシュを細かく分割して、再計算する。 ・ツリー上の「OCTREE四面体メッシュ.1」をダブルクリックして、 「OCTREE四面体メッシュ」ダイアログを表示。 ・「ローカル」タブをクリックして「ローカルサイズ」選択後に「追加」ボタンを押すと、 「ローカルメッシュサイズ」ダイアログが表示。 ・局部的にメッシュサイズを細かくする面として、図の面を選択。 ・メッシュサイズの値として 3 を入力し、OKボタンを押す。 ・ツリー上の「Von Mises応力(節点値).1」をマウス右ボタンでクリックし、 コンテキストメニューから「活動化/非活動化」を選択。 ・警告ウィンドウが表示されるので、OKボタンを押す。 ・再計算が実行され、応力コンター図が更新される。 ・表示された応力コンター図の最大応力値を、前に計算した結果と比較する。 応力値は、ほぼ同じなので解は収束している。
14. ローカルメッシュサイズの設定を削除する。14. ローカルメッシュサイズの設定を削除する。 ・ツリー上の「ローカルメッシュサイズ.1」を選択、DELキーで削除。 ・ツリー上の「Von Mises応力(節点値).1」をマウス右ボタンでクリックし、 コンテキストメニューから「活動化/非活動化」を選択し、 OKボタンを押して再計算させる。 • 15. アダプティブメッシュ機能を使って、メッシュの細分化処理を行う。 アダプティビィティの機能は、解析誤差に応じて指定した目標誤差となる ように細分割を自動的に行うものである。 • ・「新しいアダプティビティ エンティティ」アイコンを選択。 • ・[グローバル アダプティビティ]ダイアログが表示されます。 • ・ツリー上の「OCTREE四面体メッシュ.1」を選択。 • ・目標誤差を設定する。 現行誤差(%)を参考に目標誤差を設定する。いきなり目標誤差を小さく • すると計算に膨大な時間がかかるので注意が必要。 ここでは目標誤差を1%に設定。 • ・「アダプティビティによる計算」アイコンをクリック。 • ・OKをクリックして、計算を実行する。 • ・ツリー上の「グローバル アダプティビティ.1」を現行誤差(%)を確認するた • めにダブルクリックする。 • ・「Von Mises応力」アイコンをクリックして、応力コンター図を表示。 • いままでの解析結果と最大応力を比較してみる。 反復数:指定した目標誤差に到達するための実行最大反復数を指定します。
解析例 固有値解析 1. モデルを用意する。対称性を考慮した分割モデルでの解析は不可。 2. マテリアルを適用 3. [ジェネレーティブ・ストラクチャル・アナリシス]ワークベンチに切り替える。 4. 周波数解析を選択して、OKボタンをクリック。 固有値解析(拘束条件が必要) フリーフリー固有値解析(拘束条件なし) 5. 拘束条件を設定する。 ・「サーフェススライダ」アイコンをクリック。 ・3つの穴円筒面と2つの内側側面を選択する。 6. 要素タイプは2次を使用する。 ・ツリー上の「OCTREE 四面体メッシュ.1」をダブルクリック。 ・「OCTREE四面体メッシュ」ダイアログで、要素タイプが2次であることを確認する。
7. 解析条件の設定。 ・ツリー上の「周波数解析.1」をダブルクリックして計算するモード数を設定する。 ・解法を選択する。 求める固有値の数 (低周波数からの個数) 大規模モデルで高次まで高精度で安定した解を得る為にはランチョス法を選択 8. 解析計算を実行する。 ・「計算」アイコンをクリック。 ・「すべて」を選択し、OKボタンを押して解析実行。 9. 変形図を表示させる。 ・「変形」アイコンをクリックして変形モード図を表示する。 ・ツリー上の「変形メッシュ.1」をダブルクリック。 ・固有振動数が表示されるので、表示させたいモードを選択する。 10. 解析ケースを「フリー周波数解析」にして解析してみる。 フリーフリーでは1次から6次までは、剛体モードが計 算されるので無視して良い。
仮想パーツは接続する形状の弾性変形を近似的に反映する仮想パーツは接続する形状の弾性変形を近似的に反映する • 仮想パーツの設定 平滑仮想パーツ 形状モデルそのものは作成せず、“仮想的なパーツ” により作用条件が伝達される。 剛体仮想パーツ 仮想パーツは剛 接触仮想パーツ 非接触側はフリー 接触側は剛 作用点には6自由度のスプリング条件が考慮される 剛体スプリング 仮想パーツ 仮想パーツは剛 作用点には6自由度のスプリング条件が考慮される 平滑スプリング 仮想パーツ 仮想パーツは接続する形状の弾性変形を近似的に反映する
アセンブリ解析(ジェネレーティブ・アセンブリー・ストラクチャル・アナリシス)アセンブリ解析(ジェネレーティブ・アセンブリー・ストラクチャル・アナリシス) • 結合条件の定義 アセンブリ解析を行うには、2つの部品間ごとに結合条件を定義する必要が あります。(アセンブリー・デザインの構成要素間の拘束に対して結合条件を 設定する) 「スライダ結合のプロパティ」 接している境界面を互いに法線方向に固定連結、境界面上の変形は拘束しない 「接触結合のプロパティ」 接する境界面が互いに食い込まないよう連結、接触しない時は互いに自由に変形 「固定結合のプロパティ」 接している境界面を互いに固定連結、両者は単一部品のように挙動する 「固定スプリング結合のプロパティ」 2つのフェース間の弾性 リンク 「圧力フィッティング結合のプロパティ」 パーツ間にオーバーラップが存在する場合の結合 「ボルト締付結合のプロパティ」 ボルトによる締結力を考慮した結合 「剛体結合のプロパティ」 オフセットされている境界面を互いに固定連結、境界面は剛体となり変形しない 「平滑結合のプロパティ」 オフセットされている境界面を互いに固定連結、境界面は変形可能 「仮想ボルト締付結合のプロパティ」 ボルト自体はモデル化せずボルトによる締結力を考慮 「仮想スプリングボルト締付結合のプロパティ」 ボルト自体はモデル化せずボルトによる締結力を考慮し,スプリング剛性も考慮 「圧力フィッティング結合」
固定結合、スライド結合、接触結合の比較 下図のような接している2つの部品間に、固定結合、スライド結合、接触結合をそれぞれ定義して解析結果の違いを確認します。 2つの部品の境界面に各結合条件を定義する(アセンブリ・デザインでは接触拘束を作成) クランプ(完全固定) 圧力荷重を負荷 スライダー拘束 固定結合 境界面で2つの部品は一体となって変形する。 スライダ結合 境界面の接線方向にはそれぞれの部品が独立して自由に変形できる。境界面の法線方向は一体となって変形し、食い込んだり、面が離れたりしない。 接触結合 スライダ結合と同様に境界面の接線方向には自由に変形できる。境界面の法線方向については、面を押す力の場合は一体となって変形して食い込むことはないが、面が離れようとする力に対しては自由に変形できる。
固定結合、スライド結合、接触結合の比較 下図のような接している部品間に、固定結合、スライド結合、接触結合をそれぞれ定義して解析結果の違いを確認します。 等分布荷重を負荷 2つの部品の境界面に各結合条件を定義する(アセンブリ・デザインでは接触拘束を作成) クランプ(完全固定) 固定結合 境界面で穴と軸は一体となって変形する。 スライダ結合 境界面の接線方向(円周および高さ方向)にはそれぞれの部品が独立して自由に変形できる。境界面の法線方向(半径方向)は一体となって変形し、食い込んだり、面が離れたりしない。 接触結合 スライダ結合と同様に境界面の接線方向(円周および高さ方向)には自由に変形できる。境界面の法線方向(半径方向)については、面を押す力の場合は一体となって変形して食い込むことはないが、面が離れようとする力に対しては自由に変形できる。
剛体結合と平滑結合の比較 下図のような離れている部品間に、剛体結合、平滑結合をそれぞれ定義して解析結果の違いを確認します。 等分布荷重を負荷 穴と軸の円筒面に対して剛体結合または平滑結合を定義(アセンブリ・デザインでは穴と軸の中心軸に一致拘束を作成) クランプ(完全固定) 剛体結合 穴と軸の間は仮想の剛体部品で結合されて、それぞれの円筒面は剛体となるため、変形することはなく、一体となって剛体移動する。 平滑結合 穴と軸の間は仮想の部品で締結されていて力は伝達されるが、それぞれの円筒面は自由に変形できる。
B A C • ボルト締付結合 「ボルト締付結合」は、下左図のようにボルトAで部品Bを部品Cにネジ締結しているような状態で、ボルトとネジ穴との間に締付力を定義することができる機能です。下右図のようにSurface1(ボルトAのネジ部)とSurface2(部品Cのネジ穴部)に対して互いに引っ張り合う方向に力を負荷することができます。 「ボルト締付結合」は、締付力を負荷するだけの機能ですので、ボルトAと部品Bおよび部品Bと部品Cの間の「接触結合」は別に定義しておく必要があります。 アセンブリ・デザインで作成した接触拘束を使用 ボルト締付結合のグラフィック表示がボルト方向に一致するよう、[方向]フィールドで[一致]または[反対]のどちらかを選択
仮想ボルト締付結合 ・ボルトにより締結されたアセンブリ(ただし、ボルトはモデル化されていない) において初期張力の影響を考慮 ・境界面の弾性変形は阻害されない アセンブリ・デザインで作成した一致拘束を使用 • 仮想ボスプリングルト締付結合 ・ボルトにより締結されたアセンブリ(ただし、ボルトはモデル化されていない) において初期張力の影響を考慮 ・スプリング剛性の考慮 ・境界面の弾性変形は阻害されない アセンブリ・デザインで作成した一致拘束を使用
ボルト締付結合の使用例 1. アセンブリ・デザインで接触拘束を作成 ボルト頭部下面とプレート面を面接触拘束 ネジ部に相当する面同士を面接触拘束 2. ボルト締付結合を定義します。 ・「ボルト締付結合のプロパティ」アイコンをクリック。 ・「サポート」としてネジ部に作成してある面接触拘束を選択。モデル上にボルト 締結結合のシンボルが表示されます。 ・「締め付け力」として100Nを入力。 サポートで選択した面が互いにこの締付力で引っ張り合うことなります。 ・「方向」は、モデル上に表示されるシンボルが実際のボルトの向きと同じに なるように「一致」または「反対」を選択します。 ・OKボタンをクリックして、ボルト締付結合の設定完了。
3. 接触結合を定義します。 ・「接触結合のプロパティ」アイコンをクリック。 ・「サポート」としてボルト頭部に作成してある面接触拘束を選択。 ・OKボタンをクリックして、接触結合の設定完了。 4. 拘束条件を設定します。 ・「クランプ」アイコンをクリック。 ・ プレート端面を完全固定する面として選択。 5. 要素タイプは、2次を使用する。 ・ツリー上の「OCTREE四面体メッシュ.1 BOLT.1」をダブルクリックして、 要素タイプが2次であることを確認する。 ・同様にして「OCTREE四面体メッシュ.2 PLATE.1」も確認します。
6. 解析計算を実行します。 ・「計算」アイコンをクリック。 ・「計算」ダイアログで、「すべて」を選択。「プレビュー」のチェックは外す。 ・OKボタンを押して解析実行します。 7. Mises応力を表示します。 ・「Von Mises応力」アイコンをクリック。 8. 部品ごとに応力分布図を表示させます。 ・ツリー上の「Von Mises応力(節点値).1」をダブルクリック 。 ・「イメージを編集」ダイアログが表示されるので、「選択」タブに切り替えて、表示 させたい部品をアクティブグループに移動すると、その部品だけ表示されます。
強度評価 強度評価は評価対象の材質によって最適な強度評価法を選択することが重要である。 延性材料については、最大ひずみエネルギー説または最大せん断応力説に基づいて強度評価を行う。 最大ひずみエネルギー説に基づく評価では、Mises応力σMと材料の降伏応力σyを比較して降伏を判断する。 最大せん断応力説に基づく評価では、最大せん断応力(トレスカ応力)τmaxを二倍した数値と降伏応力σyを比較して降伏を判断する。なお、トレスカ応力の方がMises応力より安全側の値を示す。脆性材料では、最大主応力説に基づいて、最大主応力σ1と材料の引張強さσBを比較して強度評価を行う。疲労破壊の指標となる応力は、荷重変動に伴う応力変動範囲である。荷重履歴中における応力変動範囲σrを同一点の最大主応力差σemax=(σ1-σ3)と最小主応力差σemin=(σ1-σ3)から求める。ただし、圧縮応力場になる場合は主応力差に負の符号を付ける。次に応力振幅σa=σr/2、平均応力σm=(σemax+σemin)/2を求め、修正グッドマン線図により平均応力が0の場合の等価な応力振幅σaeqを求め、材料の疲労限度σwと比較して疲労強度を評価する。 σM=√0.5((σ1-σ2)2+ (σ2-σ3)2 + (σ3-σ1)2) τmax=0.5(σ1-σ3) • 材料特性