Download
1 / 12
120 likes | 225 Views
Robot Integration and Testing. Pat Arrigo – Team Lead/ME Wes Coleman – ME Steve Guenther – EE Adam Spirer – EE Vernon Vantucci – CE Aaron Zimmerman - ME. Introduction. Third Team on Project Track Inherited Project from Locomotion and Navigation Teams

E N D
Robot Integration and Testing Pat Arrigo – Team Lead/ME Wes Coleman – ME Steve Guenther – EE Adam Spirer – EE Vernon Vantucci– CE Aaron Zimmerman - ME
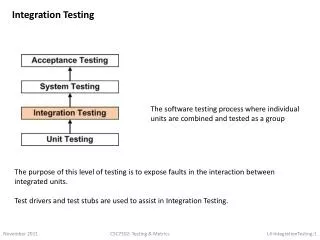
Introduction • Third Team on Project Track • Inherited Project from Locomotion and Navigation Teams • Worked in parallel with Robot Applications Team
Initial Project Expectations and Goals • Fully Integrate Navigation Software/Electrical Components with Locomotion Chassis and Motors/Motor Control • Test Customer Specifications • Integrate Robot with Application Team’s Software • Create and Mount shell to Chassis and Paint
Customer Needs and Specifications • Robot carries and cares for a plant • Robot moves slowly • Promotes innovation and green values at RIT • Friendly to passing pedestrians • Must be able to return home • Last an entire day of roaming • System uses navigation and plant sensors in order to capture real-world data, and gain an understanding of the surroundings. • Develop firmware for all of the sensors. • Develop software to perform navigational tasks using sensor data. • Maintain a wireless connection to a host computer in order to send status updates. P10215 P10216
Shell Creation • Small model used to prove concept • Sculpting full scale took longer than expected • Sheer scale • Material Differences: Styrofoam vs. Pink foam • Despite delays, shell is complete and painted
Major Setbacks • Navigation Team components and Locomotion Motor Controllers did not work properly • Majority of MSD II spent on debugging and fixing • Robot was not fully functional until ~Week 8 • Testing of Specifications was not done due to time constraints (suggested for future teams)
Milestones- MSDII • Week 1 • Initial shell design finalized, components purchased • Week 2 • Evaluation of Locomotion/firmware “bugs” • Week 4 • Header board completion • Week 5 • Sensors remounted • Shell Top & Front complete • Week 6 • New encoder design integrated • H-Bridge functionality solved • Week 7 • Shell components test fit, trimmed • Shell top, front, sides painted • Remote Control implemented via gamepad • Week 8 • Remote Control finalized • Shell top mounted • Plant, solar panels mounted • ImagineRIT • Remote Control verified • Battery charge expectancy verified • Week 9 • Shell front mounts made
Current State of Design • Robot is capable of meeting all locomotion-related requirements • Sensor Data Acquisition • Compass data not being translated correctly • All other positional and plant sensors reporting data correctly • Shell • Shell pieces made • Top & Front trimmed for fit and sensor/plant clearance • Top mounted in final location • Front mounts made, not yet attached to chassis • Rear & sides unmounted, untrimmed • All pieces painted with design scheme • Formal Platform Testing • Originally a project requirement • Platform reconstruction took precedence • Formal test plan methodology developed • No formal test plans run • ImagineRIT platform validation
Suggestions for Future Teams • Test customer specifications (velocity, turning radius etc.) • Powder coat the chassis to prevent rust • Purchase printed circuit board • Integrate Application software with current Robot (to make autonomous) • Add 2 more rear Sonar Sensors • To guard against the back end of Robot bumping into things as it turns
Summary • Number of Original Project Goals Met: 0 • Number of Robots Created: 1 • Senior Design Course: 0 • Senior Design Team: 1