Download
1 / 41
410 likes | 424 Views
Explore the abstract algebraic and geometric models of camera projection, from central projection to intrinsic/extrinsic parameters and calibration matrices. Learn about linear and non-linear methods, numerical algorithms, and solving systems of equations in camera calibration. Discuss optical distortion, non-linear optimization, and robust statistical techniques. Dive into topics like radial distortion, Gaussian and robust estimators, and iterative optimization methods in camera modeling.

E N D
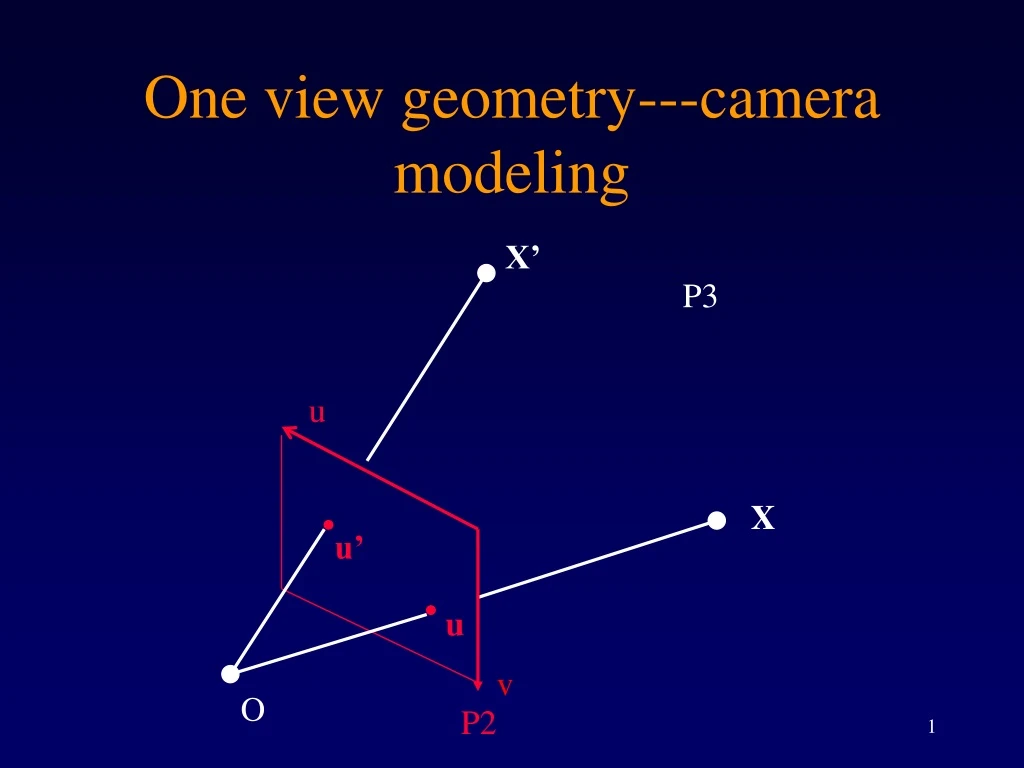
X’ P3 u X u’ u v O P2 One view geometry---camera modeling
Modeling ‘abstract’ camera: projection from P3 to P2 Math: central proj. Physics: pin-hole As lines are preserved so that it is a linear transformation and can be represented by a 3*4 matrix This is the most general camera model without considering optical distortion
X’ P3 u X u’ u v O P2
Properties of the 3*4 matrix P • d.o.f.? • Rank(P) = ? • ker(P)? • row vectors, planes • column vectors, directions • principal plane: w=0 • calibration, how many pts? • decomposition by QR, • K intrinsic (5). R, t, extrinsic (6) • geometric interpretation of K, R, t (backward from u/x=v/y=f/z to P) • internal parameters and absolute conic
Geometric description From concrete phy. paramters to algebraic param. Central projection in Cartesian coordinates • Camera coordinate frame • image coordinate frame • world coordinate frame
Z u Y y X x X f x v O Camera coordinate frame
Z u u y Y y X x o x X f x v v O Image coordinate frame
Image coordiante frame: intrinsic parameters Camera calibration matrix • Focal length in horizontal/vertical pixels (2) (aspect ratio) • the principal point (2) • the skew (1) ? • one rough example: 135 film
Z Zw u Y Xw Yw y X x X f x v O World (object) coordinate frame Xw
World coordinate frame: extrinsic parameters Finally, we should count properly ... Relation between the abstract algebraic and geometric models is in the intrinsic/extrinsic parameters!
Summary of camera modelling • 3 coordinate frame • projection matrix • decomposition • intrinsic/extrinsic param
What is the calibration matrix K? It is the image of the absolute conic, prove it first! Point conic: The dual conic:
It turns the camera into an spherical one, or angular/direction sensor! Direction vector: Angle between two rays ...
Don’t forget: when the world is planar … A general plane homography!
Camera calibration Given from image processing or by hand • Estimate C • decompose C into intrinsic/extrinsic
Calibration set-up: 3D calibration object
The remaining pb is how to solve this ‘trivial’ system of equations!
Review of some basic numerical algorithms • linear algebra • non-linear optimisation • statistics Go to see the slides ‘calibration.ppt’ for math review
Linear algebra in 5 mins • Gaussian elimination • LU decomposition • Choleski (sym positive) LL^T • orthogonal decomposition • QR (Gram-Schmidt) • SVD (the high(est)light of linear algebra!) • row space: first Vs • null space: last Vs • col space: first Us • null space of the trans : last Us
Linear methods of computing P • p34=1 • ||p||=1 • ||p3||=1 Geometric interpretation of these constraints
Non-linear … • ||p3||=1 and • no skew (p1 X p3) . (p2 X p3) = 0 It’s constrained optimizaion, but non linear …
Decomposition • analytical by equating K(R,t)=P • QR (more exactly it is RQ)
Linear, but non-optimal,but we want optima, but non-linear, methods of computing P Each observation has a (0,sigma) independent Gaussian distribution: The probability of obtaining all measurements x given that the camera matrix is P: MLE (maximum likelihood estimate) is:
Even linear models, but end up with non-linear optimization …Non-linear models for optimization, always end-up iterative linear computing!Yesterday, closed-form, algebraic methods (gradients), for small scale, Today, everything numerical in big scale.
Non-linear iterative optimisation • J d = r from vector F(x+d)=F(x)+J d • minimize the square of y-F(x+d)=y-F(x)-J d = r – J d • normal equation is J^T J d = J^T r (Gauss-Newton) • (H+lambda I) d = J^T r (LM) Note: F is a vector of functions, i.e. min f=(y-F)^T(y-F)
General non-linear optimisation • 1-order , d gradient descent d= g and H =I • 2-order, • Newton step: H d = -g • Gauss-Newton for LS: f=(y-F)^T(y-F), H=J^TJ, g=-J^T r • ‘restricted step’, trust-region, LM: (H+lambda W) d = -g R. Fletcher: practical method of optimisation f(x+d) = f(x)+g^T d + ½ d^T H d Note: f is a scalar valued function here.
statistics • ‘small errors’ --- classical estimation theory • analytical based on first order appoxi. • Monte Carlo • ‘big errors’ --- robust stat. • RANSAC • LMS • M-estimators Talk about it later
(Non-linear) Optical distorsion Radial distorsion could be modeled by • alpha_i and eventually (xc,yc) are distorsion parameters • you may have any degree for r, but probably the correction is not sufficient for first degree • x is normalised coordinates, x’ is actual distorted measures (people are confusing x and x’ • normalised as calibrated for ‘photogrammetrists’ (more difficult to write down the cost function), while normalised just to [-1,1] to compute r (easy to integrate into the cost function, still pixels)
Two approaches: • add these terms into the non-linear projection equations using a calibration object • estimate them independently using the ‘colinearity’ constraint (see Devernay, photogrammetry) to fit lines
Solution uniqueness? Rank of the matrix A?
Using a planar pattern Why? it is more convenient to have a planar calibration pattern than a 3D calibration object, so it’s very popular now for amateurs. Cf. the paper by Zhenyou Zhang (ICCV99), Sturm and Maybank (CVPR99) Homework: read these papers.
first estimate the plane homogrphies Hi from u and x, 1. How to estimate H? 2. Why one may not be sufficient? • extract parameters from the plane homographies
How to extract intrinsic parameters? The absolute conic in image The (transformed) absolute conic in the plane: The circular points of the Euclidean plane (i,1,0) and (-i,1,0) go thru this conic: two equations on K!
Summary of calibration • Get image-space points • Solve the linear system • Optimal sol. by non-linear method • Decomposition by RQ
Where is the camera? Given rom image processing or by hand • Camera pose (given K) • where is the camera?
Camera pose: 3-point algorithm • fundamental Euclidean constraint • 3 point algorithm • quarternion for rotation?
Where is the camera? A projective setting • on a plane, 1D camera, • Circle by 3 pts and a constant angle • Chasles conics • 2D camera • calibration singularities