Download
1 / 1
10 likes | 77 Views
Explores duration & impact of air pollution on health using distributed lagged models. Compares polynomial & window models for accurate estimation of effects.

E N D
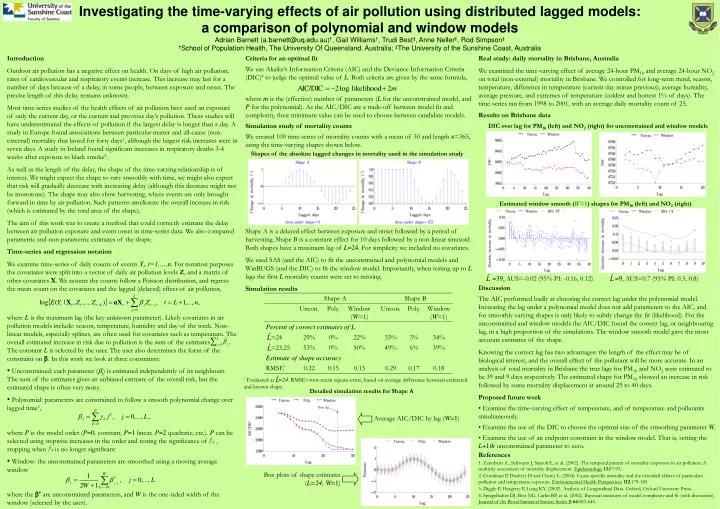
Investigating the time-varying effects of air pollution using distributed lagged models: a comparison of polynomial and window models Adrian Barnett (a.barnett@uq.edu.au)†, Gail Williams†, Trudi Best‡, Anne Neller‡, Rod Simpson‡ †School of Population Health, The University Of Queensland, Australia; ‡The University of the Sunshine Coast, Australia • Introduction • Outdoor air pollution has a negative effect on health. On days of high air pollution, rates of cardiovascular and respiratory events increase. This increase may last for a number of days because of a delay, in some people, between exposure and onset. The precise length of this delay remains unknown. • Most time-series studies of the health effects of air pollution have used an exposure of only the current day, or the current and previous day’s pollution. These studies will have underestimated the effects of pollution if the largest delay is longer than a day. A study in Europe found associations between particular matter and all-cause (non-external) mortality that lasted for forty days1, although the largest risk increases were in seven days. A study in Ireland found significant increases in respiratory deaths 3-4 weeks after exposure to black smoke2. • As well as the length of the delay, the shape of the time-varying relationship is of interest. We might expect the shape to vary smoothly with time, we might also expect that risk will gradually decrease with increasing delay (although this decrease might not be monotone). The shape may also show harvesting, where events are only brought forward in time by air pollution. Such patterns ameliorate the overall increase in risk (which is estimated by the total area of the shape). • The aim of this work was to create a method that could correctly estimate the delay between air pollution exposure and event onset in time-series data. We also compared parametric and non-parametric estimates of the shape. • Time-series and regression notation • We examine time-series of daily counts of events Yt, t=1,…,n. For notation purposes the covariates were split into a vector of daily air pollution levels Z, and a matrix of other covariates X. We assume the counts follow a Poisson distribution, and regress the mean count on the covariates and the lagged (delayed) effect of air pollution, • where L is the maximum lag (the key unknown parameter). Likely covariates in air pollution models include: season, temperature, humidity and day of the week. Non-linear models, especially splines, are often used for covariates such as temperature. The overall estimated increase in risk due to pollution is the sum of the estimates . The constant L is selected by the user. The user also determines the form of the constraint on . In this work we look at three constraints: • Unconstrained: each parameter (j) is estimated independently of its neighbours. The sum of the estimates gives an unbiased estimate of the overall risk, but the estimated shape is often very noisy. • Polynomial: parameters are constrained to follow a smooth polynomial change over lagged time3, • where P is the model order (P=0, constant, P=1linear, P=2quadratic, etc.). P can be selected using stepwise increases in the order and testing the significance of , stopping when is no longer significant. • Window: the unconstrained parameters are smoothed using a moving average window • where the * are unconstrained parameters, and W is the one-sided width of the window (selected by the user). Real study: daily mortality in Brisbane, Australia We examined the time-varying effect of average 24-hour PM10 and average 24-hour NO2 on total (non-external) mortalityin Brisbane. We controlled for long-term trend, season, temperature, difference in temperature (current day minus previous), average humidity, average pressure, and extremes of temperature (coldest and hottest 1% of days). The time-series ran from 1998 to 2001, with an average daily mortality count of 25. Results on Brisbane data DIC over lag for PM10 (left) and NO2 (right) for unconstrained and window models Criteria for an optimal fit We use Akaike’s Information Criteria (AIC) and the Deviance Information Criteria (DIC)4 to judge the optimal value of L. Both criteria are given by the same formula, where m is the (effective) number of parameters (L for the unconstrained model, and P for the polynomial). As the AIC/DIC are a trade-off between model fit and complexity, their minimum value can be used to choose between candidate models. Simulation study of mortality counts We created 100 time-series of mortality counts with a mean of 30 and length n=365, using the time-varying shapes shown below. Shape A is a delayed effect between exposure and onset followed by a period of harvesting. Shape B is a constant effect for 10 days followed by a non-linear sinusoid. Both shapes have a maximum lag of L=24. For simplicity we included no covariates. We used SAS (and the AIC) to fit the unconstrained and polynomial models and WinBUGS (and the DIC) to fit the window model. Importantly, when testing up to L lags the first L mortality counts were set to missing. Simulation results Shapes of the absolute lagged changes in mortality used in the simulation study Estimated window smooth (W=1) shapes for PM10 (left) and NO2 (right) • Discussion • The AIC performed badly at choosing the correct lag under the polynomial model. Increasing the lag under a polynomial model does not add parameters to the AIC, and for smoothly varying shapes is only likely to subtly change the fit (likelihood). For the unconstrained and window models the AIC/DIC found the correct lag, or neighbouring lag, in a high proportion of the simulations. The window smooth model gave the most accurate estimates of the shape. • Knowing the correct lag has two advantages: the length of the effect may be of biological interest, and the overall effect of the pollutant will be more accurate. In an analysis of total mortality in Brisbane the true lags for PM10 and NO2 were estimated to be 39 and 9 days respectively. The estimated shape for PM10 showed an increase in risk followed by some mortality displacement at around 25 to 40 days. • Proposed future work • Examine the time-varying effect of temperature, and of temperature and pollutants simultaneously. • Examine the use of the DIC to choose the optimal size of the smoothing parameter W. • Examine the use of an endpoint constraint in the window model. That is, setting the L+1th unconstrained parameter to zero. • References • 1. Zanobetti A., Schwartz J, Samoli E, et al. (2002). The temporal pattern of mortality responses to air pollution: A multicity assessment of mortality displacement. Epidemiology13:87-93. • 2. Goodman P, Dockery D and Clancy L. (2004). Cause-specific mortality and the extended effects of particulate pollution and temperature exposure. Environmental Health Perspectives112:179-185. • 3. Diggle P, Heagerty P, Liang KY. (2002). Analysis of Longitudinal Data. Oxford, Oxford University Press. • 4. Spiegelhalter DJ, Best NG, Carlin BP, et al. (2002). Bayesian measures of model complexity and fit (with discussion). Journal of the Royal Statistical Society Series B64:583-640. * Evaluated at =24. RMSE=root-mean square-error, based on average difference between estimated and known shape. Detailed simulation results for Shape A Average AIC/DIC by lag (W=1) Box plots of shape estimates (L=24, W=1)






