Download
1 / 1
60 likes | 301 Views
Skynet. Mission We propose to create a robot that navigates a city in search of its victim and then shoots it using a foam missile. Milestones We will construct a mock city with objects that the robot will be able to detect.

E N D
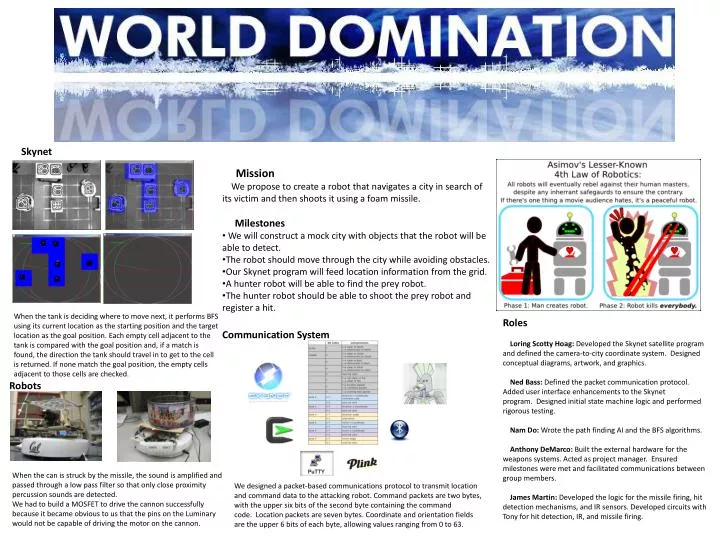
Skynet • Mission • We propose to create a robot that navigates a city in search of its victim and then shoots it using a foam missile. • Milestones • We will construct a mock city with objects that the robot will be able to detect. • The robot should move through the city while avoiding obstacles. • Our Skynet program will feed location information from the grid. • A hunter robot will be able to find the prey robot. • The hunter robot should be able to shoot the prey robot and register a hit. When the tank is deciding where to move next, it performs BFS using its current location as the starting position and the target location as the goal position. Each empty cell adjacent to the tank is compared with the goal position and, if a match is found, the direction the tank should travel in to get to the cell is returned. If none match the goal position, the empty cells adjacent to those cells are checked. Roles Loring Scotty Hoag: Developed the Skynet satellite program and defined the camera-to-city coordinate system. Designed conceptual diagrams, artwork, and graphics. Ned Bass: Defined the packet communication protocol. Added user interface enhancements to the Skynet program. Designed initial state machine logic and performed rigorous testing. Nam Do: Wrote the path finding AI and the BFS algorithms. Anthony DeMarco: Built the external hardware for the weapons systems. Acted as project manager. Ensured milestones were met and facilitated communications between group members. James Martin: Developed the logic for the missile firing, hit detection mechanisms, and IR sensors. Developed circuits with Tony for hit detection, IR, and missile firing. Communication System Robots When the can is struck by the missile, the sound is amplified and passed through a low pass filter so that only close proximity percussion sounds are detected. We had to build a MOSFET to drive the cannon successfully because it became obvious to us that the pins on the Luminary would not be capable of driving the motor on the cannon. • We designed a packet-based communications protocol to transmit location and command data to the attacking robot. Command packets are two bytes, with the upper six bits of the second byte containing the command code. Location packets are seven bytes. Coordinate and orientation fields are the upper 6 bits of each byte, allowing values ranging from 0 to 63.