Download
1 / 36
360 likes | 405 Views
Dive into the principles of torque, angular momentum, and static equilibrium in rotational dynamics. Learn about balancing systems, conservation laws, and dynamic applications. Get ready to master the vector nature of rotational motion in this insightful chapter.

E N D
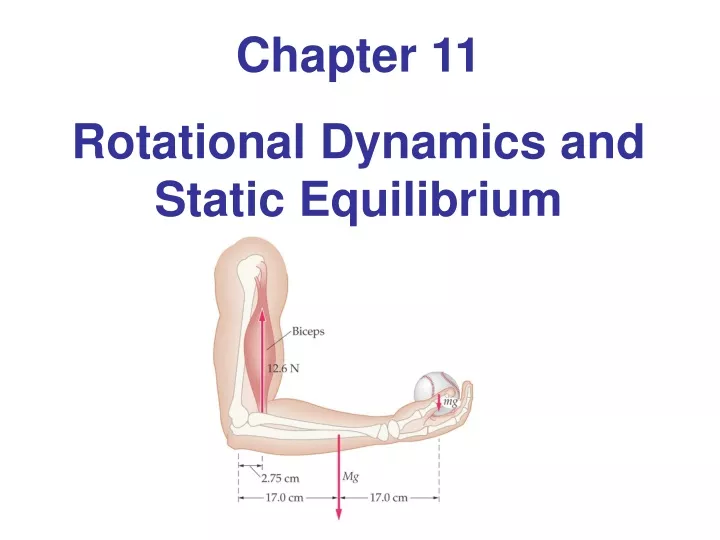
Chapter 11 Rotational Dynamics and Static Equilibrium
Units of Chapter 11 • Torque • Torque and Angular Acceleration • Zero Torque and Static Equilibrium • Center of Mass and Balance • Dynamic Applications of Torque • Angular Momentum
Units of Chapter 11 • Conservation of Angular Momentum • Rotational Work and Power • The Vector Nature of Rotational Motion
11-1 Torque We define a quantity called torque: The torque increases as the force increases, and also as the distance increases.
11-1 Torque Only the tangential component of force causes a torque:
1 2 4 3 ConcepTest 11.1 Using a Wrench You are using a wrench to loosen a rusty nut. Which arrangement will be the most effective in loosening the nut? 5) all are equally effective
1 2 4 3 ConcepTest 11.1 Using a Wrench You are using a wrench to loosen a rusty nut. Which arrangement will be the most effective in loosening the nut? Since the forces are all the same, the only difference is the lever arm. The arrangement with the largest lever arm (case #2) will provide the largest torque. 5) all are equally effective Follow-up: What is the difference between arrangement 1 and 4?
11-2 Torque and Angular Acceleration Newton's Second Law for Rotational Motion
Example • A fish takes the bait and pulls on the line of a fishing rod with a force of 2.1 N. The fishing reel is a cylinder of radius 0.055 m and mass 0.84 kg. The reel has a clutch that exerts a restraining torque of 0.047 N.m. • What is the angular acceleration of the fishing reel? • How much line does the fish pull from the reel in 0.25 s?
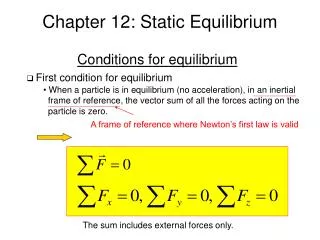
11-3 Zero Torque and Static Equilibrium If the net torque is zero, it doesn’t matter which axis we consider rotation to be around; we are free to choose the one that makes our calculations easiest.
11-3 Zero Torque and Static Equilibrium When forces have both vertical and horizontal components, in order to be in equilibrium an object must have no net torque, and no net force in either the x- or y-direction.
Announcements, 11/12 • Test Friday • Similar format to before: 16 multiple choice, 1 of 2 long problems • Covers Chapters 7 – 10, but Chapter 7 only gets a little coverage (2 MC) • Long Problems: One conservation of energy, one collisions
New Extra Credit • How has this class helped? • 250 words on how you see this class moving you towards your goals.
1m 1kg ConcepTest 11.10 Balancing Rod 1)1/4 kg 2) 1/2 kg 3) 1 kg 4) 2 kg 5) 4 kg A 1 kg ball is hung at the end of a rod 1 m long. If the system balances at a point on the rod 0.25 m from the end holding the mass, what is the mass of the rod ?
mROD = 1 kg same distance X CM of rod 1 kg ConcepTest 11.10 Balancing Rod 1)1/4 kg 2) 1/2 kg 3) 1 kg 4) 2 kg 5) 4 kg A 1 kg ball is hung at the end of a rod 1 m long. If the system balances at a point on the rod 0.25 m from the end holding the mass, what is the mass of the rod ? • The total torque about the pivot must be zero !! The CM of the rod is at its center, 0.25 m to the right of the pivot. Since this must balance the ball, which is the same distance to the left of the pivot, the masses must be the same !!
Example • Consider the mobile shown. Find the two unknown masses if the mobile is in static equilibrium.
Example • A uniform metal rod, with a mass of 3.1 kg and a length of 1.2 m, is attached to a wall by a hinge at its base. A horizontal wire bolted to the wall 0.51 m above the base of the rod holds the rod at an angle of 25˚ above the horizontal. The wire is attached to the top of the rod. • Find the tension in the wire • Find the horizontal component of the force exerted on the rod by the hinge • Find the vertical component of the force exerted on the rod by the hinge
11-4 Center of Mass and Balance If an extended object is to be balanced, it must be supported through its center of mass.
11-4 Center of Mass and Balance This fact can be used to find the center of mass of an object – suspend it from different axes and trace a vertical line. The center of mass is where the lines meet.
11-5 Dynamic Applications of Torque When dealing with systems that have both rotating parts and translating parts, we must be careful to account for all forces and torques correctly.
11-6 Angular Momentum For more general motion,
11-6 Angular Momentum Looking at the rate at which angular momentum changes,
11-7 Conservation of Angular Momentum If the net external torque on a system is zero, the angular momentum is conserved. The most interesting consequences occur in systems that are able to change shape:
ConcepTest 11.7 Figure Skater 1) the same 2) larger because she’s rotating faster 3) smaller because her rotational inertia is smaller A figure skater spins with her arms extended. When she pulls in her arms, she reduces her rotational inertia and spins faster so that her angular momentum is conserved. Compared to her initial rotational kinetic energy, her rotational kinetic energy after she pulls in her arms must be
ConcepTest 11.7 Figure Skater 1) the same 2) larger because she’s rotating faster 3) smaller because her rotational inertia is smaller A figure skater spins with her arms extended. When she pulls in her arms, she reduces her rotational inertia and spins faster so that her angular momentum is conserved. Compared to her initial rotational kinetic energy, her rotational kinetic energy after she pulls in her arms must be Krot=1/2 I 2 = 1/2 L (used L= I ). Since L is conserved, larger means larger Krot. Follow-up: Where does the extra energy come from?
11-7 Conservation of Angular Momentum Angular momentum is also conserved in rotational collisions:
11-8 Rotational Work and Power A torque acting through an angular displacement does work, just as a force acting through a distance does. The work-energy theorem applies as usual, except now it is the rotational kinetic energy that changes.
11-8 Rotational Work and Power Power is the rate at which work is done, for rotational motion as well as for translational motion. Again, note the analogy to the linear form:
Summary of Chapter 11 • A force applied so as to cause an angular acceleration is said to exert a torque. • Torque due to a tangential force: • Torque in general: • Newton’s second law for rotation: • In order for an object to be in static equilibrium, the total force and the total torque acting on the object must be zero. • An object balances when it is supported at its center of mass.
Summary of Chapter 11 • In systems with both rotational and linear motion, Newton’s second law must be applied separately to each. • Angular momentum: • For tangential motion, • In general, • Newton’s second law: • In systems with no external torque, angular momentum is conserved.
Summary of Chapter 11 • Work done by a torque: • Power: • Rotational quantities are vectors that point along the axis of rotation, with the direction given by the right-hand rule.