Download
1 / 29
300 likes | 479 Views
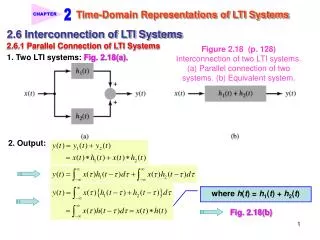
Explore the properties of LTI systems, including commutative, distributive, associative, memoryless, invertibility, causality, stability, and unit step response. Learn about discrete-time and continuous-time systems, convolution, recursive equations, and block diagram representations. Enhance your understanding of signal processing concepts.

E N D
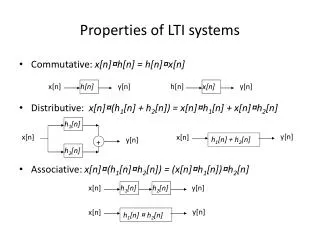
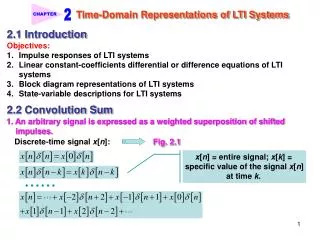
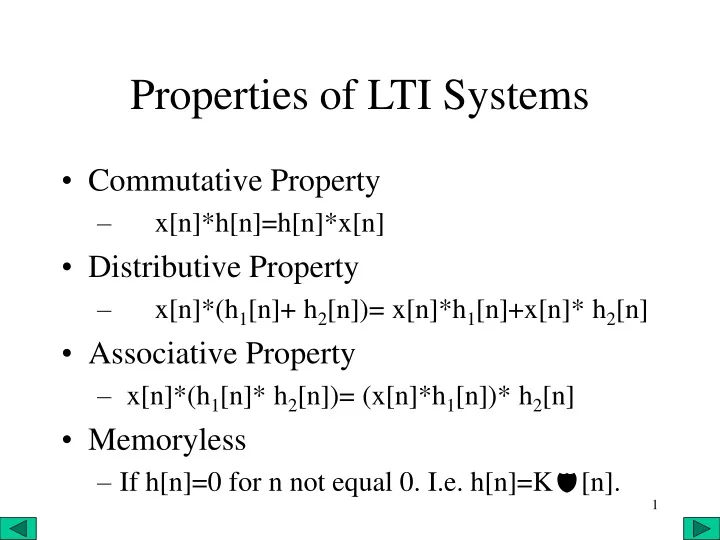
Properties of LTI Systems • Commutative Property • x[n]*h[n]=h[n]*x[n] • Distributive Property • x[n]*(h1[n]+ h2[n])= x[n]*h1[n]+x[n]* h2[n] • Associative Property • x[n]*(h1[n]* h2[n])= (x[n]*h1[n])* h2[n] • Memoryless • If h[n]=0 for n not equal 0. I.e. h[n]=Kd[n].
Properties of LTI Systems • Invertibility w(t)=x(t) h1(t) x(t) h(t) y(t) Identity System d(t) x(t)
Properties of LTI Systems • Causality • h[n]=0 for n<0 • or h(t)=0 for t<0. • Stability
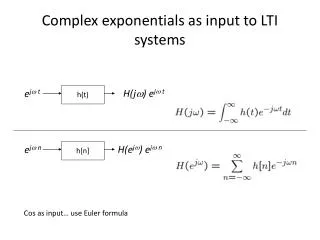
Unit Step Response of LTI System u[n] s[n] h[n] The step response of a discrete-time LTI system is the convolution of the unit step with the impulse response:- s[n]=u[n]*h[n]. Via commutative property of convolution, s[n]=h[n]*u[n]. That means s[n] is the response to the input h[n] of a discrete-time LTI system with unit impulse response u[n]. h[n] s[n] u[n]
Unit Step Response of Continuous-time LTI System Similarly, unit step response is the running integral of its impulse response. The unit impulse response is the first derivative of the unit step response:-
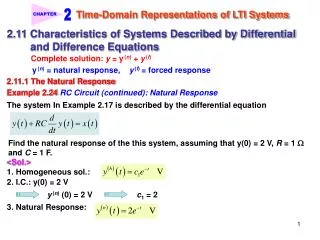
Causal LTI Systems Described By Differential & Difference Equations
Example 2.14 with impulse input(Problem 2.56 (a) Pg 158-159 OWN)
Block Diagram Representations of First- Order Systems. • Provides a pictorial representation which can add to our understanding of the behavior and properties of these systems. • Simulation or implementation of the systems. • Basis for analog computer simulation of systems described by DE. • Digital simulation & Digital Hardware implementations
First-Order Recursive Discrete-time System. y[n]+ay[n-1]=bx[n] y[n]=-ay[n-1]+bx[n] y[n] + b x[n] D -a y[n-1]
First-Order Continuous-time System Described By Differential Equation y(t) b/a + x(t) Difficult to implement, sensitive to errors and noise. D -1/a
First-Order Continuous-time System Described By Differential Equation Alternative Block Diagram. y(t) b + x(t) -a