Download
1 / 8
• 80 likes • 279 Views
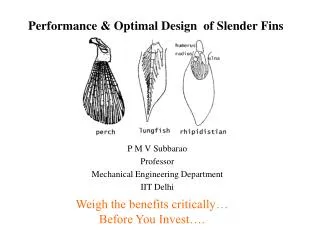
Performance of Ray Fins in Fish Locomotion. Qiang Zhu and Kourosh Shoele Department of Structural Engineering University of California San Diego. dorsal fin. caudal fin. anal fin. pectoral fin. pelvic fin. tendons. rays. Cartilage pad. base. ligament. membrane. branches.

E N D
Performance of Ray Fins in Fish Locomotion Qiang Zhu and Kourosh Shoele Department of Structural Engineering University of California San Diego
dorsal fin caudal fin anal fin pectoral fin pelvic fin tendons rays Cartilage pad base ligament membrane branches Characteristics of Ray Fins Characteristics: • Structural lightness • Deployability • Multi-dimensional controllability • 3D anisotropic flexibilty Lauder Lab Videos Ray fins of bluegill sunfish (Alben et al. 2007) Tangorra et al. 2007
Fluid-Structure Interaction Model • Potential flow model with boundary element method • Wakes are modeled as shear layers and mathematically represented by distributions of dipoles • Valid in high Reynolds numbers • Nonlinear Euler-Bernoulli beam model for embedded rays • Fully-coupled fluid-structure interactions Zhu et al. JFM 2002, Zhu & Kourosh JEB 2008
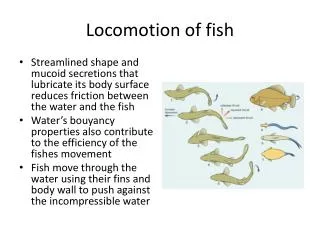
Caudal Fin Dynamics • Advantages of a fin with flexible rays: • Reduced lateral force • Increased propulsion efficiency • Reduced dependence on kinematic parameters • Achievement of different locomotion modes (homocercal, heterocercal) Zhu & Kourosh JEB 2008
Kinematics Shape and structure Flapping+rowing+baseline rotation Thorsen et al. 2005 Pectoral Fins in Labriform Swimming Rigid Rays:All the rays are rigid (red lines) Fin A:All the rays have the same stiffness (green lines) Fin B:The ray at the leading edge is strengthened (blue lines) Kourosh & Zhu JEB 2009, 2010
Summary • The ray-fin structure enables detailed control of fin motion (since each ray can be controlled individually), and is essential to the performance of the fin in locomotion. • Flexibility of the rays may enhance fin performance. It, however, depends upon detailed distribution of the stiffness (e.g. reinforcement at the leading edge).
Broader ViewOther Skeleton-Reinforced Membranes in Nature Insect Wings Mollusk Nacre Cell Membrane Venation structure in the wing of a Manduca sexta (from Combes & Daniel 2003). Cell membrane contains a lipid bilayer supported by a protein scaffold (the cytoskeleton) (T. Wittmann, Science Photo Library). Mollusk (e.g. abalone) nacre contains a chitin network that controls the growth and mechanical properties of the shell (Asaro & Harley 2004). Zhu et al. Biophy. J 2007; Zhu & Asaro Biophy. J. 2008; Peng et al. Phys. Review E. 2010
Acknowledgements This study is supported by NSF.