Download
1 / 4
40 likes | 100 Views
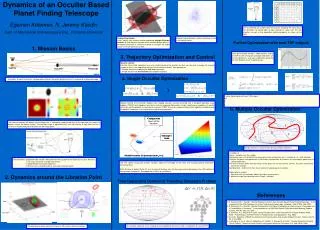
Active Occulter. Roy Coulter Institute for Astronomy/ UH. Design Parameters. Near limb observations with minimal scattered light Moving edge centered on optical axis for good occulting Radial motion and rotating assembly Must fit within 13mm field stop volume

E N D
Active Occulter Roy Coulter Institute for Astronomy/ UH
Design Parameters • Near limb observations with minimal scattered light • Moving edge centered on optical axis for good occulting • Radial motion and rotating assembly • Must fit within 13mm field stop volume • Radial slit sensing with offset bias for limb position adjustment • Motion requirement – a ‘few’ arc seconds, +100 hz • Thermal control via heat pipe technology • Manual switching between observing modes
Active Occulter Concept PI piezo electric bender, 60 V 200+ Hz @ ±5 arc-sec Thermal control: 3mm heat pipes + copper strap for occulting edge Permanent drive system, insert bolted in place and stored on heat stop Single photo sensor Rotation and limb position set visually by observer
Active Occulter Concept (cont.) 5mm x 5mm stop FOV = 128” x 128” Irradiance = 2.5 W/mm2 .375 W/mm2 @ 85% refl. Thermal loads: Limb image - 24 W 0.1 mm gap - 1 W Occulter - 0.7 W ave. Tracker slit - ~100 mW max