Download
1 / 14
140 likes | 270 Views
Capstone Project, SP 2006. Ultrasonic Probe Manipulator. Department of Mechanical Engineering, IUPUI. Group: Chris Weisheim Tim Pommer Rishi Govalakrishnan Alan Koers Mentor: Dr. Jie Chen Sponsor: IU Medical School. Overview. Introduction Reason for Design

E N D
Capstone Project, SP 2006 Ultrasonic Probe Manipulator Department of Mechanical Engineering, IUPUI Group: Chris Weisheim Tim Pommer Rishi Govalakrishnan Alan Koers Mentor: Dr. Jie Chen Sponsor: IU Medical School
Overview • Introduction • Reason for Design • Requirements of Design • Targets • Final Concept • Product Demonstration • Product Evaluation • Impact • Recommendations • Question and Answer
Reason for Design • To develop a device for holding an ultrasound probe while conducting lithotripsy tests
Main Requirements • Hold probe against test specimen • Meet space constraints • Waterproof • Controlled by external source
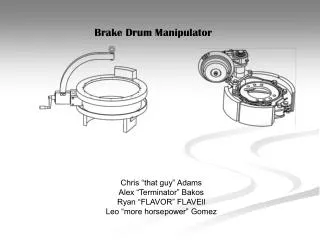
Arm/Hub Threaded Rod O.R. Shoulder Bolt Outer Ring I.R. Threaded Insert Bracket Rod Threaded Bolt Inner Ring O.R. Bearing Anchor C.A.D. Assembly Components
Controller Software-driven controller • Graphic interfaced software • Runs on Windows OS • Allows for easy control of device • Can make fine adjustments easily and remotely
Evaluation Prototype was evaluated: • Against customer requirements • Against engineering specifications • With ANSYS for FEA
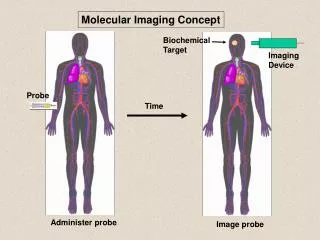
Impact Safety • Hands free manipulation Environmental • Bio-friendly Society • Aids in improving impacts of Lithotripsy experiments on the blood flow in the kidneys
Recommendations Future Work: • Enhance controller • Longer, less rigid flexible shafts • Adjustable grip for different probe sizes • Enhanced locking mechanisms