Download
1 / 23
240 likes | 371 Views
Design of Visual Displays for Driving Simulator Research. G. John Andersen Department of Psychology University of California, Riverside. Vision Issues in Driving Simulators. Driving tasks require accurate perception of depth and distance in the 3D scene

E N D
Design of Visual Displays for Driving Simulator Research G. John Andersen Department of Psychology University of California, Riverside
Vision Issues in Driving Simulators • Driving tasks require accurate perception of depth and distance in the 3D scene • What sources of information are critical • Integration of sources • Conflict between sources • Visual Display • Display characteristics (Aliasing, Flicker, Update,Refresh, Resolution)
Failure to Consider these issues in Driving Simulators • Poor task performance • Low external validity of results • Poor transfer of training • Increased risk of simulator sickness
Motion parallax Occlusion Cast Shadows , 96 Size constancy Disparity Depth Contrast Convergence Aerial 1 10 100 Depth (meters) Cutting, 1996
Viewer-centered Information Accommodation Linear Perspective Disparity Motion Parallax Linear Perspective Relative Size Motion Parallax Texture (perspective) Specular Highlights Object-centered Information Surrounding Frame Compression Gradient Structure from Motion Compression Gradient Structure from Motion Texture (non-perspective) Shading Overall scene depth Layout of Objects Properties of Objects Andersen, Braunstein, & Saidpour, 1998
Driving Tasks and Perception • Multiple sources of information available for driving tasks • What information is critical for what tasks • Multiple sources for a specific task • Different tasks require different information sources • Use of multiple sources • Cue interactions • Cue conflicts
Multiple sources for a specific task: Collision Detection • Model based on analysis of visual information available to driver (Andersen & Sauer, 2004) • Use of 5 parameters t (motion parallax; optic flow) dt/dt (motion parallax; optic flow) a da/dt ds (texture gradients, disparity, relative size)
TopView FrontView t=0 t=1 q t=q/Dq t specifies the time to contact during constant velocity collisions
Vehicle Motion No F/S V/S F/C V/C No F/S Object Motion V/S F/C V/C F = Fixed Speed V = Variable Speed S = Straight Path C = Curved Path
Select Object Derive a, d/dt (angular direction) Is a=0? Or d/dt0?(constant angular direction) Yes No Derive t Is t>0? (expansion)? Derive dv-ds Derive dt/dt Yes Is dt/dt =0? (Constant expansion) Is dv-ds =0? (Constant expansion) Yes Collision Object No No Is dt/dt >=-0.5? Yes Is dv-ds >0? No Non-collision Object
Different tasks and different sources of information • Two tasks with different sources of information • - Collision Detection (constant speeds and linear trajectories): Optical Expansion (TTC) and a • Vehicle Speed: Edge Rate • Question: Does information from one task affect use of information for second task
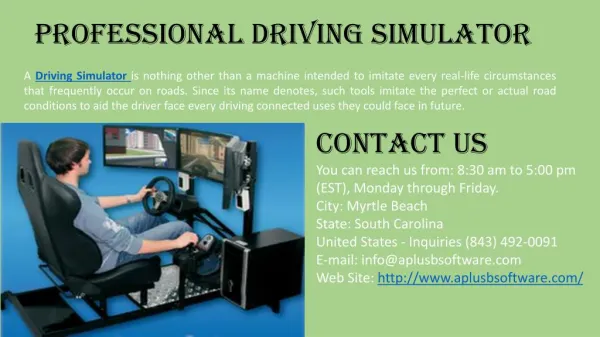
Experiment • Issue: Does information for one task affect use of information for a different task • Task: collision detection • Independent Variables • Collision or non-collision object • Time to contact (TTC) • Different combinations of vehicle speed and object speed • Dependent variable • Sensitivity (d’)
Simulators depict a 3D world • Perception of 3D scene includes • Texture gradients • Motion parallax • Occlusion • -other information sources
Visual system also has cues for perceiving the distance to the display
3 Information sources for depth and distance of Display - Binocular Disparity - Eye convergence - Accommodation
Motion parallax Occlusion Cast Shadows , 96 Size constancy Disparity Depth Contrast Convergence Accommodation Aerial 1 10 100 Depth (meters) Cutting, 1996
Visual Cue Conflicts between display cues and 3D scene cues Visual Cue conflict: - Disparity, convergence and accommodation information specify display is flat - Motion parallax, texture gradients, and other cues specify scene is 3D
Human Factors Solutions to these Issues • Determine perceptual information needed for driving tasks of interest • Design displays to optimize performance of tasks • Consider interactions of different information sources • Minimize cue conflicts • Design for optimal performance not for high fidelity • Question need of high fidelity rendered scenes, control dynamics and fixed/variable base simulator