Download
1 / 8
80 likes | 166 Views
Robotic Arms and Matrices. By Chris Wong and Chris Marino. The Canadarm. First operation 1998 Used for assembly of the International Space Station Composed of a series of arms of fixed length connected by rotating joints. Key Concepts. Translation Rotation Homogeneous Coordinates

E N D
Robotic Arms and Matrices By Chris Wong and Chris Marino
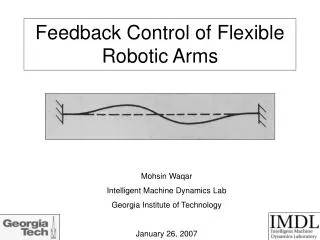
The Canadarm First operation 1998 Used for assembly of the International Space Station Composed of a series of arms of fixed length connected by rotating joints
Key Concepts • Translation • Rotation • Homogeneous Coordinates • Matrix Multiplication
Translation • Not a linear transformation • Translation along vector V = [a,b] in R2 • Transformation represented by T(x) = x + V in R2 • Translation is caused by the position of the previous arm
Rotation • Rotation is a Linear Transformation • Rotates any Vector about the origin
Homogeneous Coordinates • Represents vector in R2 as a vector in R3 • x = [x,y] in R2 • X = [x,y,1] in R3 • Rotation and Translation operations can thus be represented using homogeneous coordinates
Translation and Rotation in one • Represented through Matrix Multiplication • T R represents Translation by Rotation • R T does not equal T R
Second Arm • To represent second arm’s movement • Same as representing the first • Give each arm its own coordinate system • a and b are the x and y coordinates of the origin of the second arm with respect to the origin of the first arm • This new origin is obtained when by taking the components of the first arm when it is rotated about an angle theta • Now combining movements of the first and second arm • T2 * T1