Download
1 / 10
110 likes | 651 Views
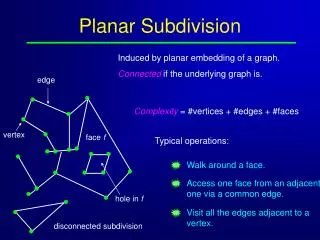
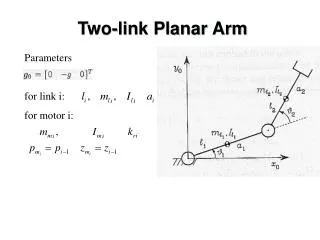
Two-link Planar Arm. Two-link Planar Arm. Joint Space Dynamic Model. Viscous friction torques. Actuation torques. Coulomb friction torques. Force and moment exerted on the environment. Coriolis/ centripetal torque. Multi-input-multi-output; Strong coupling; Nonlinearity.

E N D
Joint Space Dynamic Model Viscous friction torques Actuation torques Coulomb friction torques Force and moment exerted on the environment Coriolis/ centripetal torque Multi-input-multi-output; Strong coupling; Nonlinearity
Direct Dynamics and Inverse Dynamics • Direct dynamics: • Given joint torques and initial joint position and velocity, determine joint acceleration • Useful for simulation • Inverse dynamics: • Given joint position, velocity and acceleration, determine joint torques • Useful for trajectory planning and control algorithm implementation
Two-link Planar Arm: Inverse Dynamics (Example 4.2) Matlab Toolbox
Two-link Planar Arm: Direct Dynamics (Example 4.2) • Robot toolbox • Case 1: no actuating torques • Case 2: actuating only the first joint • Case 3: simulate puma560 by yourself
Matlab Toolbox • Useful functions • Accel (pp 20): Compute manipulator forward dynamics • Coriolis(pp 22): Compute the manipulator Coriolis/centripetal torque components • Gravload(pp 33):Compute the manipulator gravity torque components • Itorque(pp40): Compute the manipulator inertia torque component • Rne(57): Compute inverse dynamics via recursive Newton-Euler formulation • Simulink library • Roblocks.mdl
Two-link Planar Arm: Dynamic Model L{1} = link([ 0 1 0 0 0], 'standard'); % D-H param L{2} = link([ 0 1 0 0 0], 'standard'); L{1}.m = 50; %link mass L{2}.m = 50; L{1}.r = [ -0.5 0 0]; % center of mass referred to the link frame L{2}.r = [ -0.5 0 0]; L{1}.I = [ 0 0 10 0 0 0]; % inertia tensor L{2}.I = [ 0 0 10 0 0 0]; L{1}.Jm = 0.01; %inertia of motor L{2}.Jm = 0.01; L{1}.G = 100; %gear reduction ratio L{2}.G = 100; global mytl; mytl = robot(L); mytl.gravity=[0 9.81 0];
Joint Space Dynamic Model Viscous friction torques Actuation torques Coulomb friction torques Force and moment exerted on the environment Coriolis/ centripetal torque Multi-input-multi-output; Strong coupling; Nonlinearity