Download
1 / 19
210 likes | 510 Views
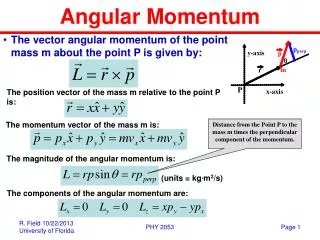
Chapter 10 More on angular momentum and torque In chapter 9 we described the rotational motion of a rigid body and, based on that, we defined the vector of angular momentum as: L = I

E N D
Chapter 10 More on angular momentum and torque In chapter 9 we described the rotational motion of a rigid body and, based on that, we defined the vector of angular momentum as: L = I In chapter 10 we will give a more general definition of L and introduce the principle of the conservation of angular momentum. This principle is: (a) A fundamental principle of Physics, and (b) A handy tool to solve a certain class of problems on rotational motion (10-1)
The cross product of two vectors C = A BWe combine A and B to form a new vector C 1. Magnitude of C C = ABsin 2. Direction of C C is perpendicular on the plane defined by A and B 3. Sense of C It is given by the right hand rule (RHR) (10-2)
Right Hand Rule (RHR) I. Choose the smallest angle by which you have to rotate vector A (in the plane defined by A and B ) so that it coincides with vector B II. Curl the fingers of the right hand in that direction III. The thumb of the right hand points along C (10-3)
z ^ k ^ j ^ i O y x In terms of components: (10-4)
z x r P rod O F y Example: Find the torque produced by the force F acting at point P on the rod. Indeed = rFsin The cross product gives the correct magnitude and direction for (10-5)
New definition of angular momentum L Consider an object (mass m, position vector r, linear momentum p = mv). According the the definition of chapter 9 its angular momentum L = I New definition: We will show that the old and the new definition give the same result (10-6) m
Indeed the two definitions give the same result from L and thus are equivalent (10-7) m A
System of particles: here we deviate again from the notion of a rigid body introduced in chapter 9. A system of particles is a collection of N particles of mass m1, m2, … mNbut it is not necessarily rigid. For example a group of meteorites traveling in space, although not rigid, is a system of particles Total angular momentum is the vector sum of the angular momenta of all the particles in the system L = L1 + L2 + … + LN Total torque is the vector sum of the torques of all the particles in the system = 1 + 2 + … + N (10-9)
The total angular momentum L and total torque of a system obey the equation: which we have shown to be true for a single particleThis equation states that the rate of change of the total angular momentum L of a system is equal to the total torque on the system Note:When we calculate we only have to take into account the torques generated by external forces. The torques generated by internal forces can be ignored!This is an important simplification (10-10)
When we calculate we only have to take into account the torques generated by external forces. This can easily be shown in the simple case of a system that consists of two particles. Total force on particle 1: F1 = F1ext + F12 Total force on particle 2: F2 = F2ext + F21 F12 + F21 = 0 (Newton’s third law) F21 = - F12 1 = r1F1ext+ r1F12 2 = r2F2ext+ r2F21 2 = r2F2ext- r2F12 = 1 + 2 = r1F1ext+ r2F2ext+ (r1 -r2)F12 the last term vanishes = r1F1ext+ r2F2ext (10-11)
Conservation of angular momentum More concisely: This principle is true for any system of particles (including rigid bodies) (10-12)
Example (10-6) page 280 A student sits on a spinning stool with weights in his hands and rotates with an initial angular velocity o The student pulls his hands so that they are close to his torso. Find the final angular velocity o = 2/To = 2.1 rad/s (10-13)
R = 0.25 m M = 50 kg m = 2 kg d = 0.5 m L = 1 m To = 3s Lf Li R m m m m L+R (10-14)
Central forces A central force is one that acts along the line joining the source of the force and the object on which the force acts. For example the force F exerted by the sun on a comet The torque of the force is: = rF = rFcos180º = 0 The rate of change in the angular momentum of the comet is: F r (10-15)
As a result of the fact that the angular momentum of the comet is constant, the comet sweeps equal areas in equal times (shaded areas in the figure). This is known in astronomy as “Kepler’s second law” . For that reason the comet has to move faster when it is closer to the sun (between points C and D) and slow down when it is further away (between points A and B) (10-16)
Conservation of rotational energy Consider a rolling object of radius R and mass m. In chapter 9 we saw that the velocity of the center of mass and the angular velocity are connected via the equation: vcm = R The kinetic energy of the rolling object is given by: The first term in the expression for K is the rotational energy about the center of mass. The second term is the kinetic energy due to the translation of the center of mass. We can use energy conservation in problems that involve rotational motion (10-17)
Example (10-7), page 285. A spool of mass m, moment of inertia about its axis I , and radius R unwinds under the force of gravity. Use conservation of energy to find the speed of the spool’s center of mass after it has fallen by a length h (10-18)
before after . U = 0 CM . CM vcm y h (10-19)