Download

1 / 26
260 likes | 418 Views
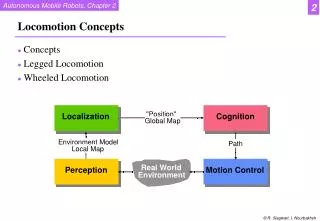
Metastable Locomotion for LittleDog. Katie Byl Robot Locomotion Group July 11, 2007. Goal: piecewise control. Repeatable open-loop motions Based on simple (approximate) physical models Good evidence for high repeatability Define a working range for each motion

E N D
Metastable Locomotion for LittleDog Katie Byl Robot Locomotion Group July 11, 2007
Goal: piecewise control • Repeatable open-loop motions • Based on simple (approximate) physical models • Good evidence for high repeatability • Define a working range for each motion • Improve accuracy through trials (learning) • Estimate reliability for a particular motion • Select short-sighted motion with best “performance” • Stability metrics for locomotion on rough terrain: mean first-passage time (MFPT) • Speed also a requirement
Is short-sighted control ok? • Mean first-passage time (MFPT) • Goal: Exceptional performance most of the time, with rare failures (falling) • Metric: maximize distance (or time) between failures
Metastable dynamics • Metastability • Fast mixing-time dynamics • Rapid convergence to long-living (metastable) limit-cycle behavior
Markov Process • The transition matrix for a stochastic system prescribes state-to-state transition probabilities • For metastable systems, the first (largest) eigenvalue of its transpose is 1, corresponding to the absorbing FAILURE state • The second largest eigenvalue is the inverse MFPT, and the corresponding vector gives the metastable distribution F
MFPT and Metastability • Fast mixing-time dynamics • Rapidly either fails (falls) or converges to long-living (metastable) limit-cycle behavior add Gaussian noise; sigma=.2 Deterministic return map Stochastic return map MFPT as fn of init. cond. Metastable basin of attraction
MFPT and Metastability • Example for a DETERMINISTIC system with high sensitivity to initial conditions (as shown by steep slope of the return map) • Green shows where the “metastable basin” is developing • MFPT and density of metastable basin give us better intuition for the system dynamics (where the exact initial state is not known)
Motion Control for LittleDog • LittleDog Phase 2: dynamic, ZMP-based gaits • All 6 teams passed Phase 1 metrics (below) • 3 teams (at most) can pass Phase 2 • Phase 1: 1.2 cm/sec, 4.8 cm [step ht] • Phase 2: 4.2 cm/sec, 7.8 cm Fastest recorded run, with NO COMPUTATION: - about 3.4 cm/sec Fastest flat-terrain walk and trot: 17 and 20+ cm/s
Sequencing motions: Funnels • R. R. Burridge, A. A. Rizzi, and D. E. Koditschek. Sequential composition of dynamically dexterous robot behaviors. International Journal of Robotics Research, 18(6):534-555, June 1999.
Double-support gait creation • 3 possible leg-pairing types • Pacing left vs right • Bounding fore vs rear • Trot diagonal pairings • ZMP method: Aim for COP near “knife-edge” • Not simply planning leg-contacts… • Plan [model] COB accelerations and ground forces directly Pacing Trotting
Double-support gait creation Pacing
ZMP pacing – with smoothing • Smoothing requested ZMP reduces overshoot square wave smoothed input
Phase 2: dynamic gaits • Control of ZMP using method in Kajita03 • S. Kajita, F. Kanehiro, K. Kaneko, K. Fujiware, K. Harada, K. Yokoi, and H. Hirukawa. Biped walking pattern generation by using preview control of zero-moment point. In ICRA IEEE International Conference on Robotics and Automation, pages 1620-1626. IEEE, Sep 2003.
Motivation – Phase 2 • Opportunity for science in legged robots • Dynamic gaits [Phase 2] • Speed • Agility • Precision motion planning (vs CPG) • Optimal to respond to variations in terrain • Wheeled locomotion analogy: • Tricycle = static stability [Phase 1] • Bicycle = dynamic and fast • Unicycle = dynamic and agile
Double-support results to date • Bounding – currently quite heuristic… • Plan a “step” in COP, to REAR legs for Δt • At start of Δt, tilt body up • Push down-and-back with rear legs • Simultaneously extend fore legs • Recover a zero-pitch 4-legged stance • Plan a “step” in COP, to FORE legs • Intended “lift” of rear legs - actually dragged
Repeatability • Bounding: PITCH
Repeatability • Bounding: COB X position
Sensing • Bounding: Pitch via “sensor fusion”
Repeatability • ZMP Walking: Pitch
Repeatability • ZMP Trot-Walking: Pitch
Repeatability • Dynamic climb: (10 consecutive trials) Pitch
Repeatability • Dynamic climb: (10 consecutive trials) Roll
Repeatability • Dynamic climb: (10 consecutive trials) Yaw
Repeatability • Bounding: Force sensor (est. vert. force)
Repeatability • Bounding: accelerometer and force sensors
Where to go next (post-thesis) • Optimization of double-support • Gradient methods, in general • Actor-critic, in particular • Attempt “unipedal” support? • Is there a practical use in Phase 2? • Is this interesting science? • Potential for significant airborne phase • Plan now for 5x more compliant BDI legs