Download

1 / 20
200 likes | 505 Views
Analysis of the SHRP 2 Naturalistic Driving Study Data [S08(B)] Evaluation of Offset Left-Turn Lanes Jessica M. Hutton Presentation to MCTRS August 15, 2013. Research Objectives. Phase 1 Determine if we can use the NDS dataset to evaluate gap acceptance behavior at offset left-turn lanes

E N D
Analysis of the SHRP 2 Naturalistic Driving Study Data [S08(B)] Evaluation of Offset Left-Turn LanesJessica M. HuttonPresentation to MCTRS August 15, 2013
Research Objectives Phase 1 • Determine if we can use the NDS dataset to evaluate gap acceptance behavior at offset left-turn lanes • Develop and validate a study design to do this Phase 2 • Answer the study questions: • Do offset left-turn lanes affect turn behavior and gap acceptance? • What effect does the presence of a vehicle in the opposing left-turn lane have? • Develop design guidance for offset left-turn lanes
IRB and DSA • This research is designed specifically to avoid the collection or use of personally identifying information of NDS participants. • We are exempt from IRB approval. • We cannot use the NDS data for any other research without another DSA, and we cannot share it with third parties. • If we develop any datasets that could be useful to other researchers, those will be made available to SHRP 2.
Identifying Intersections • To answer our research questions, we need intersections with the following characteristics: • Dedicated left-turn lanes • Unsignalized or permissive left-turn signal phasing • No sight limitations due to geometry • Drivers making left turns there • Among the intersections chosen, we need a variety of offset conditions to observe how changes in offset correlate with changes in gap acceptance behavior
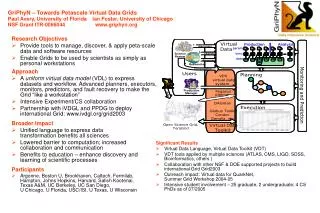
Protected-only left-turn phasing Positive offset Highway agencies can help identify intersections with desired signal phasing Heavily traveled intersections Protected/Permissive left-turn phasing Permissive-only left-turn phasing Zero offset Signalized Unsignalized Negative offset Any of these intersections could be considered for use in analysis Intersections with dedicated left-turn lanes Trips made through intersections All NDS data
Data Request • Using NDS data to identify study intersections • CTRE has gathered roadway characteristics information for many highly traveled routes. They are currently helping to develop a list of intersections for us to evaluate for inclusion in the research, and are providing the following data for each intersection: • Traffic control (signalized, two-way stop, etc.) • Number/type of lanes • AADT of approach legs (to the extent available) • GPS coordinates • VTTI created trip maps early in the project to identify the routes with the highest number of trips by NDS participants. The list of intersections provided by CTRE will be narrowed to those with the highest trip counts.
Data Request • After list of potential study intersections is developed: • Research team views intersections in Google Earth to look for desirable characteristics such as: • 90° intersection angle (no skew) • No significant grade or horizontal curvature on approaches • Amount of offset of left-turn lanes (need to get a range from negative to positive) • Research team identifies approaches of interest at each intersection • Research team provides VTTI with final list of intersections for which data will be requested
Data Request • Data request is location based • We provide VTTI with the GPS coordinates of the intersections we chose to study, and they provided us with forward and rear video, as well as some elements of the time-series data, for any left-turn trips made through that intersection. • The beginning and end of a trip are defined by proximity to the center of the intersection. A “geofence” is placed at a 500-ft radius boundary around the center of the intersection. • VTTI helped develop this solution after we had difficulty defining the beginning and end of a trip in terms of time. Trips at a given intersection all begin and end in the same location, and are of various lengths of time depending on how long drivers wait at the intersection and how fast they are driving.
Using the Data • Our primary data source is the forward and rear video • A Community Viewer was developed as a tool by VTTI to view all camera views simultaneously, but this didn’t work well for us. • In Phase 1, data reduction was manual—we watched forward video and rear video independently and recorded observations in an Excel spreadsheet. • For Phase 2, we started developing our own viewer to watch the forward and rear video together, and are integrating a data-reduction interface specific to our project.
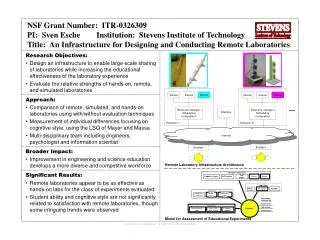
Using the video data to measure gaps Time T2:Turn is made by study driver Time T3: First opposing through vehicle reaches the center of the intersection after the study vehicle makes the left turn Time T0: First opposing through vehicle reaches the center of the intersection after the study vehicle arrives Time T1: Next opposing through vehicle reaches the center of the intersection T0, T1 and T2 are viewed in the forward-facing camera T3 is estimated from forward camera or viewed in rear camera Rejected Gap = T1 – T0 Accepted Gap = T3 – T1
Data Elements from Video Reduction • For each turn made by NDS study vehicle: • Time when study vehicle arrives in queue • Time when study vehicle becomes first in queue • Position in queue when study vehicle arrives • Time when turn is made • Signal indication when study vehicle arrives and when turn is made (also, time when signal indication changes if applicable) • Light and weather conditions • For each gap accepted or rejected by NDS or non-NDS driver: • Timestamp for end of each gap • Presence of opposing left-turner and impact on sight distance • Presence of opposing right-turner
Analysis Approach Hypotheses to be Tested: • Do different types of offset affect drivers’ gap acceptance behavior? • Does presence of an opposing left-turn vehicle affect that gap acceptance behavior? • Do different types of offset affect the rate of occurrence for erratic maneuvers during left turns? Statistical Method Used: • Logistic regression analysis
Anticipated Phase 2 Research Results • Design guidance and recommended criteria for offset left-turn lanes • Recommended updated text for left-turn lane discussion in Chapter 9 of the Green Book • Useful to traffic safety engineers, design engineers, and planners in state and local highway agencies, as well as consultants and researchers