Download
1 / 1

E N D
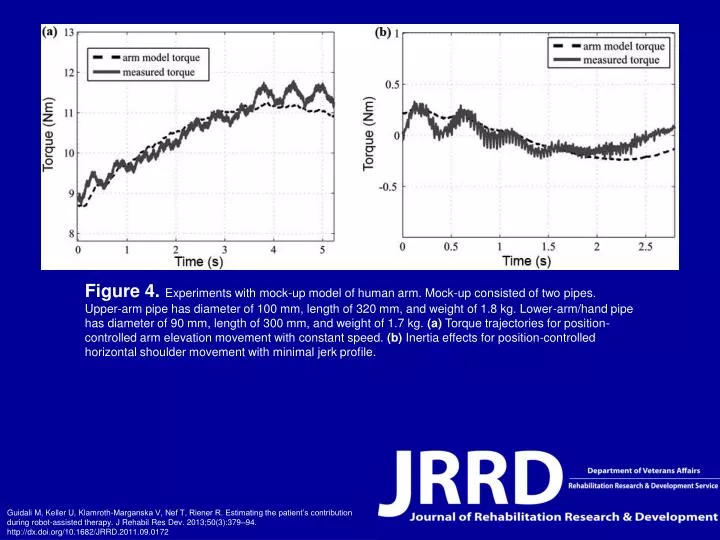
Figure 4. Experiments with mock-up model of human arm. Mock-up consisted of two pipes. Upper-arm pipe has diameter of 100 mm, length of 320 mm, and weight of 1.8 kg. Lower-arm/hand pipe has diameter of 90 mm, length of 300 mm, and weight of 1.7 kg. (a) Torque trajectories for position-controlled arm elevation movement with constant speed. (b) Inertia effects for position-controlled horizontal shoulder movement with minimal jerk profile. Guidali M, Keller U, Klamroth-Marganska V, Nef T, Riener R. Estimating the patient’s contribution during robot-assisted therapy. J Rehabil Res Dev. 2013;50(3):379–94.http://dx.doi.org/10.1682/JRRD.2011.09.0172
