Download
1 / 26
280 likes | 597 Views
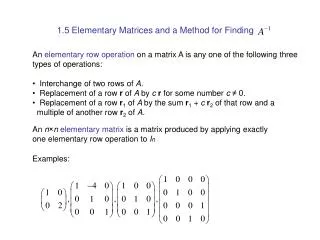
2.5 Elementary Matrices. Definition. An (n x n) matrix is an elementary matrix if it is obtained from the identity matrix by a single elementary row operation. Elementary row operations: Type I: Interchange two rows. Type II: Multiply a row by a non-zero constant.

E N D
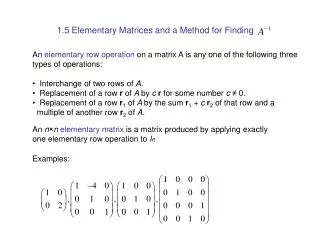
Definition • An (n x n) matrix is an elementary matrix if it is obtained from the identity matrix by a single elementary row operation. • Elementary row operations: • Type I: Interchange two rows. • Type II: Multiply a row by a non-zero constant. • Type III: Add a multiple of one row to another.
Examples Type I Type II Type III
Summary of Effects • To interchange two rows of matrix: • Multiply the matrix times the elementary matrix of type I • To multiply a row times a scalar: • Multiply the matrix times the elementary matrix of type II • To add a multiple of one row to another: • Multiply the matrix times the elementary matrix of type III.
Theorem 1 • If A is any (m x n) matrix and E the (m x m) elementary matrix obtained by performing an elementary row operation on the (m x m) identity. EA will result in the same matrix as you would get from performing the same row operation on A.
Example • Find E such that EA is the result of adding 4 times row two to row 3:
Inverting the elem. row ops • Type I: interchange rows p and q • Type II: multiply row p by c≠0 • Type III: add k times row p to row q Inverse ops Interchange rows p and q Multiply row p by 1/c Subtract k times row p from row q.
Theorem 2 • Every E is invertible, and the inverse is an E of the same type: • E-1 is the elementary mtx obtained from I by the inverse of the row operation that produced E from I. • Proof: E is the result of performing row op k on I • E’ is result of performing k’(inverse of k) on I • Apply k to A and get EA • Apply k’ to EA and get E’(EA) • k’ reverses k, so applying k then k’ to A results in A • So E’EA = A • Choose A = I, then E’E = I. (Could show EE’ = I) �
Example • Write inverse of following elementary matrices:
An extension • Applying E1, E2,…,Ek to A gives EkEk-1…E2E1A • Call U=EkEk-1…E2E1, then get UA • Could also get U by applying the same sequence of row operations to I. • So same sequence of row operations applied to [A I] results in [UA U] (becomes helpful later)
Theorem 3 • Given that A is an (m x n) matrix, and A can be taken to B by sequence of elementary row operations: • B = UA where U is an invertible (m x m) mtx • U = EkEk-1…E2E1 where the E’s are the elem. Matrices corresponding to the elem. Row ops that take A to B (in reverse order). • U can be constructed without finding Ei by taking [A I] to [UA U] (same ops that take A to UA take I to U)
Invertibility of U • U is simply a product of elementary matrices, which are invertible by theorem 2. • From 2.3 theorem 4 (part 4), the product of invertible matrices is also invertible. • Therefore, U is invertible.
Example • Put A into reduced row echelon form and then express it as UA (where U is the product of elementary matrices). Hint: since we know that the same sequence of elementary row operations that takes A to UA is the same as those which take I to U, we can simply: Augment A with I2, then row reduce. What we get on right is U.
Factoring U into E’s • Take the same A matrix, and instead of finding U, find E’s such that U=Ek…E2E1 Hint: put A into rref noting the elem. Row ops you perform. Find E’s to match.
Theorem 4 • The following are equivalent for (n x n) matrix A: • A is invertible • If YA = 0 where Y is (1 x n), then Y = 0 • A has rank n. • A can be carried to In by elementary row operations. • A is a product of elementary matrices.
Proof of Theorem 4 • To prove 5 statements equivalent, we simply show that 1implies 2 which implies 3, etc, and 5 implies 1 • Proof: • 1 implies 2: Given A is invertible, YA = 0 implies Y=YI= YAA-1 = 0A-1=0
Proof of Thm 4 (continued) • 2 implies 3: we can take A to UA in reduced row echelon form (by thm 3) by a sequence of elem. Row ops. We just need to show that UA has n non-zero rows. • If this is not true, then UA has a row of zeros at bottom. • If we choose Y=[0 0 0 … 1], then Y(UA)=0 which implies YU = 0 (based on prop 2) • Since U is invertible, Y=0 (from 2.3) (contradiction)
Proof of Thm 4 (continued) • 3 implies 4: Given--A can be put into reduced row echelon form with n non-zero rows. • Since the resulting matrix is (n x n) it will be In. • 4 implies 5: I = UA where U=Ek…E2E1 and U is invertible (by thm 3). • U-1UA = U-1I so A = U-1 =(Ek…E2E1)-1=E1-1E2-1…Ek-1 • So A is a product of elementary matrices
Proof of Thm 4 (continued) • 5 implies 1: • A is a product of elementary matrices. • Elementary matrices are all invertible. • The product of invertible matrices is also invertible (by 2.3 theorem 4). • Therefore, A is invertible.
Example • Write A as a product of elementary matrices: • Hint: Put in reduced row echelon form and determine E’s to match each elem. Row operation. Then Ek…E2E1A=I , so A = (Ek..E2E1)-1
Theorem 5 • A and B are (n x n) matrices. If AB = I, then BA = I, so A and B are invertible and A = B-1, B=A-1. • Proof: • If YA = 0, then 0B = (YA)B=Y(AB)=YI=Y • Since Y = 0, A is invertible. • Since A is invertible, A-1AB = A-1I • So B = A-1.
Theorem 6 • If A is (n x n), the following are equivalent • A is invertible • The homogeneous system AX = 0 has only the trivial solution X = 0. • The system AX = B has a solution for every (n x 1) matrix B. • Proof: 2.3 theorem 2 said that if A is (n x n) and invertible, then AX = B has a unique solution and X = A-1B. • so 1 implies 2 and 3 above by this theorem
Proof of Theorem 6(cont) • 2 implies 1: We try to show AT invertible first by using thm. 4 which says that if YAT = 0 implies Y=0, then AT is invertible: • Assume YAT = 0 • Then AYT = (YAT)T = 0T=0 • By property 2, this means that YT = 0, so Y=0 • Therefore, AT is invertible by theorem 4 • Therefore, A is invertible by 2.3 theorem 4
Proof of Theorem 6(cont) • 3 implies 1: prop 3 says that AX = B has a solution for every (n x 1) matrix B. So we can put together B= [B1 B2 … Bn], and X=[X1 X2 … Xn] such that the X’s are solutions matching the B’s. Then AX = B (put together) • So if we define Bj = jth column of In then, [B1 B2 … Bn] = In • AX = I, so A is invertible.

![[MATRICES ]](https://cdn4.slideserve.com/144276/matrices-dt.jpg)