Download
1 / 1
10 likes | 199 Views
ふるまい. ゴール. 停止. インコース. アウトコース. ライン検知. マーカ検知. タイムアウト. タイムアウト. タイマ2タイムアウト. 第2ループ終了. タイムアウト. 遊泳. マーカ検知 [ タイマ2タイムアウト & タイマ2時間内 ]. entry / エッジチェンジ (); タイマ起動 () do / マーカ探索 (). 1 個目マーカ探索. 走行モード 変更. entry / 右旋回 () do / ライン探索 (). 2個目マーカ探索. PID 制御走行. 減速走行. entry / タイマ1起動 ();

E N D
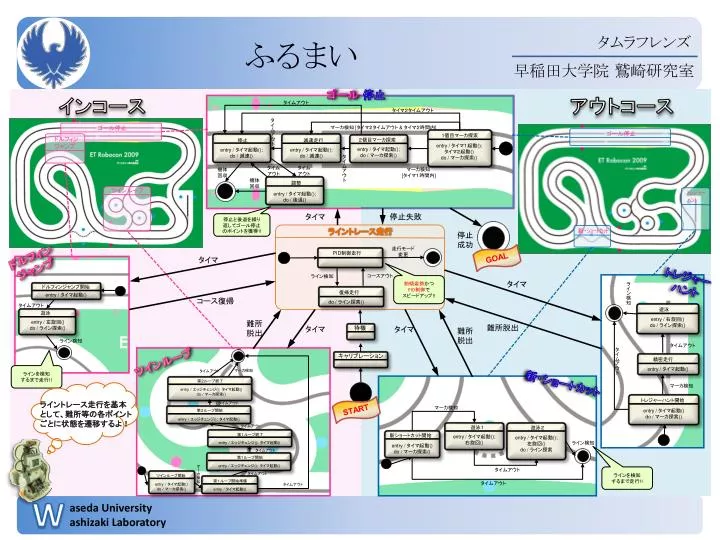
ふるまい ゴール 停止 インコース アウトコース ライン検知 マーカ検知 タイムアウト タイムアウト タイマ2タイムアウト 第2ループ終了 タイムアウト 遊泳 マーカ検知 [タイマ2タイムアウト & タイマ2時間内] entry / エッジチェンジ(); タイマ起動() do / マーカ探索() 1個目マーカ探索 走行モード 変更 entry / 右旋回() do / ライン探索() 2個目マーカ探索 PID制御走行 減速走行 entry / タイマ1起動(); タイマ2起動() do / マーカ探索() タイマ 停止失敗 マーカ検知 タイムアウト entry / タイマ起動(); do / マーカ探索() entry / タイマ起動(); do / 減速() 停止と後退を繰り返してゴール停止のポイントを獲得!! タイムアウト ライントレース走行 停止 成功 第2ループ開始 コースアウト ライン検知 タイム アウト タイム アウト ドルフィン ジャンプ マーカ検知 [タイマ1時間内] 機体 回収 タイムアウト タイマ タイムアウト entry / エッジチェンジ(); タイマ起動() 遊泳1 遊泳2 トレジャー ハント 機体 回収 待機 キャリブレーション タイマ 前傾姿勢かつ PID制御で スピードアップ!! 復帰走行 精密走行 新ショートカット開始 タイムアウト entry / タイマ起動(); 右旋回() コース復帰 entry / タイマ起動(); 左旋回() do / ライン探索 entry / タイマ起動(); do / 後退() do / ライン探索() ライン検知 entry / タイマ起動() entry / タイマ起動() do / マーカ探索() 難所 脱出 第1ループ終了 ドルフィンジャンプ開始 難所脱出 タイマ タイマ 難所 脱出 entry / タイマ起動() タイムアウト entry / エッジチェンジ(); タイマ起動() ゴール停止 ゴール停止 新・ショートカット ツインループ ドルフィン ジャンプ トレジャー ハント マーカ検知 遊泳 ツインループ entry / 左旋回() do / ライン探索() ラインを検知 するまで走行!! タイムアウト 新・ショートカット 停止 タイムアウト ライン検知 調整 トレジャーハント開始 第1ループ開始 entry / タイマ起動(); do / 減速() ライントレース走行を基本 として、難所等の各ポイント ごとに状態を遷移するよ! entry / タイマ起動() do / マーカ探索() タイムアウト entry / エッジチェンジ(); タイマ起動() マーカ検知 タイムアウト ツインループ開始 ラインを検知 するまで走行!! 第1ループ開始準備 entry / タイマ起動() do / マーカ探索() タイムアウト entry / タイマ起動() START GOAL
