Download
1 / 28
280 likes | 345 Views
Advanced Networks. PhD. Saúl Pomares Hernández. Causal Delivery. Clocks, events and process states. A distributed system is defined as a collection P of N processes p i , i = 1,2,… N Each process p i has a state s i consisting of its variables (which it transforms as it executes)

E N D
Advanced Networks PhD. Saúl Pomares Hernández Causal Delivery
Clocks, events and process states • A distributed system is defined as a collection P of N processes pi, i = 1,2,… N • Each process pi has a state si consisting of its variables (which it transforms as it executes) • Processes communicate only by messages (via a network) • Actions of processes: • Send, Receive, change own state • Event: the occurrence of a single action that a process carries out as it executes e.g. Send, Receive, change state • Events at a single process pi, can be placed in a total ordering denoted by the relation i between the events. i.e. eie’ if and only if e occurs before e’ at pi • A history of process pi: is a series of events ordered by i history(pi)= hi =<ei0, ei1, ei2, …>
Logical time and logical clocks Happened-before(Lamport 1978) • Instead of synchronizing clocks, event ordering can be used • If two events occurred at the same process pi (i = 1, 2, … N) then they occurred in the order observed by pi, that is • when a message, m is sent between two processes, send(m) happened before receive(m) • The happened before relation is transitive Not all events are related by consider a and e (different processes and no chain of messages to relate them) they are not related by ; they are said to be concurrent; write as a || e ab(at p1) cd (at p2) bc because of m1 also df because of m2
Lamport’s logical clocks • A logical clock is a monotonically increasing software counter. It need not relate to a physical clock. • Each process pi has a logical clock, Li which can be used to apply logical timestamps to events • LC1: Li is incremented by 1 before each event at process pi • LC2: • (a) when process pi sends message m, it piggybacks t = Li • (b) when pj receives (m,t) it sets Lj := max(Lj, t) and applies LC1 before timestamping the event receive (m) ee’ implies L(e)<L(e’) The converse is not true, that is L(e)<L(e') does not imply ee’
Vector clocks • Vector clock Vi at process pi is an array of N integers • VC1:initially Vi[j] = 0 for i, j = 1, 2, …N • VC2:before pi timestamps an event it sets Vi[i] := Vi[i] +1 • VC3:pi piggybacks t = Vi on every message it sends • VC4:when pi receives (m,t) it sets Vi[j] := max(Vi[j] , t[j]) j = 1, 2, …N ( then before next event adds 1 to own element using VC2) Note that ee’ implies V(e)<V(e’). The converse is also true
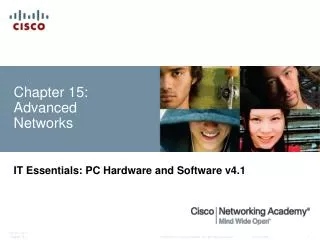
A B C Initial vector (0,0,0) (0,0,0) (0,0,0) T i m e m1 (1,0,0) m2 (1,1,0) The message m2 arrives but can not be delivered (1,0,0) Only after the delivery of m1 , The message m2 also can be delivered. Causal Order deliver [BIR91] Causal Ordering: Ifsend(m) send(m’), thenk g deliveryk(m) deliveryk(m’) Delivery condition if(VT(m’ )[i] = VT(pj)[i] +1 andVT(m’ )[k] VT(pj)[k] (k i, k=1…n) then delivery(m)
Causal Order deliver • The general algorithm of vector time for causal delivery is as follows: • Initially, VT(pi)[j] = 0 j=1…n. • For each event send(m) at pi, • VT(pi)[i] = VT(pi)[i] + 1. • Each multicast message by process pi is timestamped with the updated value of VT(pi). • For each event deliveredj(m’), pj modifies its vector time in the following manner: • VT(pj)[k]=VT(m’) For each receptionreceive(m’) à pj , ij, m’=(i,VT(m’),message) • To enforce a causal delivery of m’ • i. Delivery condition • if not(VT(m’)[i] = VT(pj)[i] +1 andVT(m’)[k] VT(pj)[k] (k i, k=1…n) • then • wait • else • ii delivery(m)
Problem m1 m2 m3 t m4 m5
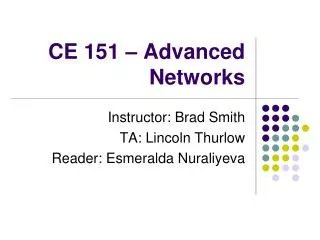
m1 m2 g3 m3 p3 p1 g1 g2 p2 Delivery of event m3 must be delayed. Causal Order deliver, Multigroup Case If sendi(m,g) sendj(m’,g’), thenk g g’ deliveryk(m) deliveryk(m’) p3 p1 g3 g1={p1, p2} g2={p2, p3} g3={p1, p3} g2 (1,0,x) (x,0,1) (1,x,0) (1,0,x) (x,0,0) (0,x,0) (1,0,x) (x,0,0) (1,x,0) g1 m2 m3 m1 p2 Delivery condition - VTa(m)[i] = VTa(pj)[i] +1 - k : (pk gaΛki): VTa(m)[k]≤VT(pj)[k] and - g : (g Gj): VTg(m) ≤VTg(pj) t p2g1 g2
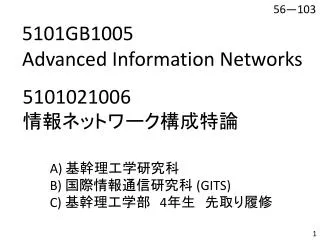
e1 e3 e2 e4 e5 Delivery of event e5 must be delayed. Exercise ch3 p3 p1 p3 ch3 p1 ? ch2 e1 ch1 p2 ch1 ch2 p2 . . . ? ch1={?} ch2={?} ch3={?} e5 p2ch1 ch2
The Basic Principles (cont.) The causal relation, denoted by : 1. x, ay, bifx=ya < b 2. x, ay, bifx, a is the sending of an event and y, bis the delivery of that event . 3. x, ay, bifz, c | (x, az, cz, cy, b)
Immediate Dependency Relation • The problem with causal ordering : • The amount of control information emitted for large values of n = |G| is prohibitively high. Immediate Dependency Relation : ee’[ (e e’) e” E, (e e” e’)]
Immediate Dependency Relation (cont.) Causal Intra-Channel Ordering: Ifsend(e) send(e’), thenk c deliveryk(e) deliveryk(e’) Proposition 1: Ife,e’ Esend(e) send(e’), thenk c deliveryk(e) deliveryk(e’)
e e 2 2 S S 1 1 e e e S S 3 3 2 2 3 S S e e e 3 3 4 4 4 S S 4 4 e 2 Serial Events p p p p p p 1 2 3 4 4 5 5 e e3e4 1 Immediate Dependency t t e1 e2 e3 e4 IDR Graph Immediate Dependency Relation : ee’[ (e e’) e” E, (e e” e’)]
e S S e 1 1 2 e 3 3 S S 2 1 S S 3 1 S S 4 1 e2 e6 S S 5 1 e S S e 5 1 6 5 e1 S S 7 1 e3 e4 e5 S S 1 8 e 2 Concurrent Events p p p p p 1 2 3 4 5 (e2|| ( e3 e4) ) e6 e 1 Immediate Dependency e t 4 e 6 IDR Graph Immediate Dependency Relation : ee’[ (e e’) e” E, (e e” e’)]
e2 e6 e1 e3 e4 e5 Immediate Dependency Relation : ee’[ (e e’) e” E, (e e” e’)]. Concurrent Relation || : e || e’(e e’ e’ e) Observation : (e’ee”e) e’ || e”
For Multi-Channel Case Immediate Inter-Channel Dependency Relation : (e,c)(e’,c’) [((e,c) (e’, c’))(e”, c’’)E, ((e,c) (e”, c’’) (e’, c’) c’’cc’’c’)] Observation: Ifonly one channel exists in the system, then =
Causal Inter-Channel Ordering: Ifsend(e,c) send(e’,c’), thenk cc’ deliveryk(e) deliveryk(e’) Proposition 2: Ife,e’ Esend(e,c) send(e’,c’), thenk cc’ deliveryk(e) deliveryk(e’)
e1 e2 ((e1,ch1)(e2,ch3))(e3,ch2) e3 Events with IICDR to e3 Delivery of event e3 must be delayed. Inter-channel Dependency p3 p1 ch3 Proposition 2: Ife,e’ Esend(e,c) send(e’,c’), thenk cc’ deliveryk(e) deliveryk(e’) ch2 ch1 p2 Immediate Inter-Channel Dependency Relation : (e,c)(e’,c’) [((e,c) (e’, c’))(e”, c’’)E, ((e,c) (e”, c’’) (e’, c’) c’’cc’’c’)] t p2ch1 ch2
Implementation JSDT 1 * Consistent Session * Session 1 1 1 * * Causal Ordering Channel Channel 1 1 * * * * Participant * * The MCP General Structure
Membership Membership service The rest of Participants Participant pk The only no causal message req_join(ch, pk) Wait for serv_join serv_join(ch,pk,np) Memory reservation for a new participant pk • Wait for np-1 messages init_join. • Actualization of its VT init_join(pk, pi,VT(pi)[i]) join(ch, pk) Only after the reception of join, we consider pk like a member of channel ch Join Procedure
Membership Participant pk Membership service The rest of Participants req_leave(ch, pk) Wait for serv_leave serv_leave(ch,pk) leaving notification of pk leave(ch, pk) Only after the reception of leave, on efface toute information concernant pk Leave Procedure
Implementation (cont.) Cooperative Distributed Engineering System Multi-Channel Coordination Protocol Java Shared Data Toolkit Light Reliable Multicast Protocol . . . g channels 1 2 Network The MCP Architecture