Download
1 / 40
450 likes | 872 Views
Anthropometrics I. Rad Zdero, Ph.D. University of Guelph. Outline. Anatomical Frames of Reference What is “Anthropometrics”? Static Dimensions Dynamic (Functional) Dimensions Measurement of Dimensions. Anatomical Frames of Reference. Planes of Motion. Transverse Plane. Sagittal Plane.

E N D
Anthropometrics I Rad Zdero, Ph.D. University of Guelph
Outline • Anatomical Frames of Reference • What is “Anthropometrics”? • Static Dimensions • Dynamic (Functional) Dimensions • Measurement of Dimensions
Anatomical Frames of Reference Planes of Motion Transverse Plane Sagittal Plane Frontal Plane
Relative Position Posterior Lateral Lateral Medial Medial Anterior Top View (Transverse Plane)
A B C A B C Relative Position Point A is Proximal to point B Point B is Proximal to point C Point A is Proximal to point C Point C is Distal to point B Point B is Distal to point A Point C is Distal to point A
What is “Anthropometrics”? • The application of scientific physical measurement techniques on human subjects in order to design standards, specifications, or procedures. • “Anthropos” (greek) = person, human being • “Metron” (greek) = measure, limit, extent • “Anthropometrics” = measurement of people
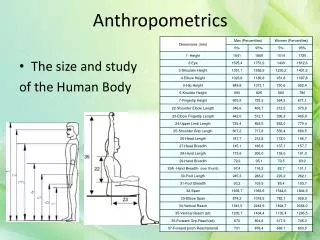
Static Dimensions • Definition: “Measurements taken when the human body is in a fixed position, which typically involves standing or sitting”. • Types • Size: length, height, width, thickness • Distance between body segment joints • Weight, Volume, Density = mass/volume • Circumference • Contour: radius of curvature • Centre of gravity • Clothed vs. unclothed dimensions • Standing vs. seated dimensions
Static Dimensions [Source: Kroemer, 1989]
Static Dimensions • Static Dimensions are related to and vary with other factors, such as … • Age • Gender • Ethnicity • Occupation • Percentile within Specific Population Group • Historical Period (diet and living conditions)
Static Dimensions • AGE Lengths and Heights 0 10 20 30 40 50 60 70 80 Age (years)
Static Dimensions • GENDER [Sanders & McCormick]
Static Dimensions • ETHNICITY [Sanders & McCormick]
Static Dimensions • OCCUPATION • e.g. Truck drivers are taller & heavier than general population • e.g. Underground coal miners have larger circumferences (torso, arms, legs) • Reasons • Employer imposed height and weight restrictions • Employee self-selection for practical reasons • Amount and type of physical activity involved
Static Dimensions • PERCENTILE within Specific Population Group Normal or Gaussian Data Distribution No. of Subjects 5th percentile = 5 % of subjects have “dimension” below this value Dimension (e.g. height, weight, etc.) 50 % 95 %
Static Dimensions • HISTORICAL PERIOD • (Europe, US, Canada, Australia) 4 inch increase in 8 decades Increase in Average Adult Height (inches) 1880 1890 1900 1910 1920 1930 1940 1950 1960 1970 1980 1990 Decade
Dynamic (Functional) Dimensions • Definition: “Measurements taken when the human body is engaged in some physical activity”. • Types: Static Dimensions (adjusted for movement), Rotational Inertia, Radius of Gyration • Principle 1 - Estimating • Conversion of Static Measures for Dynamic Situations • e.g. dynamic height = 97% of static height • e.g. dynamic arm reach = 120% of static arm length • Principle 2 - Integrating • The entire body operates together to determine the value of a measurement parameter • e.g. Arm Reach = arm length + shoulder movement + partial trunk rotation and + some back bending + hand movement
Dynamic (Functional) Dimensions [Source: North, 1980]
L Segment Joint or Hinge Segment Lengths: Link/Hinge Model • Segments are modeled as rigid mechanical links of known physical shape, size, and weight. • Joints are modeled as single-pivot hinges. • Standard points of reference on human body are defined in the scientific literature and are not arbitrarily used in ergonomics • Less than 5% error by this approximation
Segment Density D = M / V = (W/g) / V where D = density [g/cm3 or kg/cm3] M = mass [g or kg] V = volume [cm3 or m3] W = weight [N or pounds] g = gravitational acceleration = 9.8 m/s2
Segment Density Double-tank system for measuring displaced volume of human body segments on living or cadaver subjects. Using standardized density tables, the mass can then be calculated using D = M / V. [source: Miller & Nelson, 1976]
Segment C-of-G [Kreighbaum & Barthels, 1996] Segment Center-of-Gravity • Important to know the location of the effective center of gravity (or mass) of segments • Gravity actually pulls on every particle of mass, therefore giving each part weight • For the body, each segment is treated as the smallest division of the body • Can obtain C-of-G for individual segments or group of segments • C-of-G usually slightly closer to the “thicker” end of the segment
30 30 Force 20 20 10 10 3 6 9 9 6 3 distance 30 30 20 20 10 10 Force 3 6 9 9 6 3 distance Different weight or mass distributions can have the same C-of-G C-of-G Line [adapted from Kreighbaum & Barthels, 1996]
Segment Centers-of-Gravity shown as percentage of segment lengths [Dempster, 1955].
C-of-G line C-of-G line C-of-G line Segment Center-of-Gravity Balance Method • Weight (force of gravity) & vertical reaction force at the fulcrum (axis) must lie in the same plane. [Kreighbaum & Barthels, 1996]
W2 L2 L2 O W2 O Segment Center-of-Gravity • Reaction Board Method 1 – Individual Segments Sum all moments around pivot point ‘O’ for both cases: -WX – SL – W2L2 = 0 -WX’ – S’L – W2L2 = 0 Subtract equations and rearrange to obtain the exact location (X) of C-of-G for the shank/foot system: X = {L(S - S’)/W + X’} [LeVeau, 1977]
Segment Center-of-Gravity Weigh Scales Reaction Board Method 2 – Group of Segments C-of-G Support Point [Hay and Reid, 1988]
Segment Center-of-Gravity Suspension Method • Determine pivot point which balances the object in 2D plane • Use frozen human cadaver segments [Hay & Reid, 1988]
A B C 5 N 30 N 10 N distance O 2 4 6 8 Segment Center-of-Gravity Multi-Segment Method • Imagine a body composed of three segments, each with the C-of-G and mass as indicated • sum of Moments of each segment mass about the origin = Moment of the total body mass about the origin • mathematically: SMO = MA + MB + MC = MA+B+C
O Multi-Segment Method Example – Leg at 90 deg O A leg of is fixed at 90 degrees. The table gives CGs and weights (as % of total body weight W) of segments 1, 2, and 3. Determine coordinates (xCG, yCG) of Centre of Gravity of leg system. Step 1 - sum of moments of each segment about origin ‘O’ as in Figure 5.39. SMO=xCG{W1+W2+W3}=x1W1+x2W2+ x3W3 xCG = {x1W1 +x2W2 + x3W3}/(W1+W2+W3) = {17.3(0.106W) + 42.5(0.046W) + 45(0.017W)}/(0.106W + 0.046W + 0.017W) xCG = 26.9 cm [Oskaya & Nordin, 1991]
C-of-G O Step 2 - rotate leg to obtain the yCG and repeat the same procedure as Step 1. SMO = yCG{W1 + W2 + W3} SMO = y1W1 + y2W2 + y3W3 yCG = {y1W1 + y2W2 + y3W3} /(W1 + W2 + W3) = {51.3(0.106W) + 32.8(0.046W) + 3.3(0.017W)}/(0.106W + 0.046W + 0.017W) yCG = 41.4 cm
Segment Rotational Inertia • Rotational Inertia, I (Mass Moment of Inertia) • real bodies are not point masses; rather the mass is distributed about an axis or reference point • resistance to angular motion and acceleration • depends on mass of body & how far mass is distributed from the axis of rotation • specific to a given axis
[Miller & Nelson, 1976] Rotational Inertia, I I = rotational inertia m = mass r = distance to axis or point of interest Rotational inertia can be calculated around any axis of interest. Distance from axis (r2) has more effect than mass (m)
Radius (k) at which a point mass (m) can be located to have the same rotational inertia (I) as the body (m) of interest measures the “average” spread of mass about an axis of rotation; k = “average r” not same as C-of-G k is always a little larger than the radius of rotation (which is the distance from C-of-G to reference axis) k = I/m Radius of Gyration, K [Hall, 1999]
k = I/m Example - Radius of Gyration, k Smaller k Smaller I Faster Spin Larger k Larger I Slower Spin
pivot L f C-of-G Measuring Rotational Inertia, I • Pendulum Method • use frozen cadaver segments • frictionless, free swing, pivot system • measure rotational resistance to swing I = WL / 2f2 I = rotational inertia (kg.m2) W = segment weight (N) L = distance from C-of-G to pivot axis (m) f = swing frequency (cycles/s) [see Lephart, 1984]
I = R/(2f)2 = Rp2/2 I = rotational inertia (kg.m2) R = spring constant (N.m/rad) p = period (sec) f = freq. of oscillation (cycles/sec) Measuring Rotational Inertia, I [Peyton, 1986] • Oscillating Beam Method • use live subjects • forced oscillation system • measure resistance to • forced rotation
Sources Used • Chaffin et al., Occupational Biomechanics, 1999. • Dempster, Space Requirements of the Seated Operator, 1955. • Hay and Reid, 1988. • Kroemer, “Engineering Anthropometry”, Ergonomics, 32(7):767-784, 1989 • Lephart, “Measuring the Inertial Properties of Cadaver Segments”, J.Biomechanics, 17(7):537-543, 1984. • LeVeau, Biomechanics of Human Motion, 1977. • Peyton, “Determination of the Moment of Inertia of Limb Segments by a Simple Method”, J.Biomechanics, 19(5):405-410, 1986. • Sanders and McCormick, Human Factors in Engineering and Design, 1993. • Moore and Andrews, Ergonomics for Mechanical Design, MECH 495 Course Notes, Queens Univ., Kingston, Canada, 1997.
Hall, Basic Biomechanics, 1999. • Miller and Nelson, Biomechanics of Sport, 1976. • Kreighbaum & Barthels, Biomechanics: A Qualitative Approach for Studying Human Movement, 1996. • North, “Ergonomics Methodology”, Ergonomics, 23(8):781-795, 1980. • Oskaya & Nordin, Fundamentals of Biomechanics, 1991. • Webb Associates, Anthropometric Source Book, 1978.