Download
1 / 28
290 likes | 515 Views
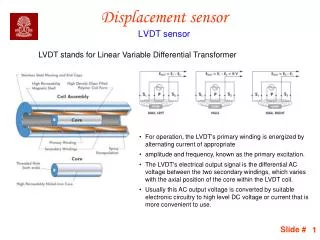
PRESENT WEATHER SENSOR. PRESENT WEATHER SENSOR. Measures visibility (MOR) from 10 m up to 50 km Identifies present weather type and intensity of precipitation type of obstruction to vision Measures the intensity of precipitation Calculates the accumulation of precipitation

E N D
PRESENT WEATHER SENSOR • Measures visibility (MOR) from 10 m up to 50 km • Identifies present weather • type and intensity of precipitation • type of obstruction to vision • Measures the intensity of precipitation • Calculates the accumulation of precipitation • Estimates snow accumulation
Visibility & MOR • Meteorological Optical Range (MOR) has been defined by the WMO as the basic parameter to express the optical state of the atmosphere • MOR corresponds closely with human visibility observations (day observations) • MOR has been defined as a purely physical quantity • objective • it can be measured
MOR 5 % intensity 100 % intensity Definition of MOR • MOR can be measured by measuring the attenuation of light• attenuation is caused by scattering and absorption
Transmitter Receiver Scatter Measurement • Scattered flux is proportional to extinction coefficient (absorption is usually negligible) • Forward scatter meter measures the light scattered from a beam and estimates extinction coefficient • high scatter intensity => high extinction coefficient • low scatter intensity => low extinction coefficient • note that only part of the scattered light is measured!
Present Weather • Present weather is practically defined by the contents of WMO code tables • table 4677 for human observations (SYNOP) • table 4680 for automatic systems (SYNOP) • table 4678 for reports from aerodromes (METAR) • The code tables contain many different physical phenomena • fog, precipitation, cloud phenomena • Automatic systems can not detect all the different phenomena in the code tables • present weather sensors typically can detect different precipitation types and may detect different visibility reducing phenomena
FD12P Scatter Measurement • FD12P samples the scatter signal rapidly and can detect precipitation droplets from the signal • Droplet sizes can be measured from the signal changes
Capacitive Precipitation Measurement • RainCap sensing element • Thin wires under glass coating form a capacitor • The capacitance changes when there is water on the surface • capacitance change is proportional to water amount • RainCap is heated • water evaporates from the surface • snow melts on the surface
Capacitive Sensor Output • The output from the capacitive sensor is a voltage signal • the signal is sampled at 1s intervals • Precipitation intensity can be estimated from the signal level and signal changes (caused by new droplets)
FD12P Precipitation Type Principle • Optical measurement, relative to droplet size • Capacitive measurement, relative to water content of droplets • Liquid precipitation (e.g. rain): water content and droplet volume are equal • Solid precipitation (e.g. snow): water content is much lower than droplet (snowflake) size
FD12P Precipitation Type Implementation Capacitive signal (proportional to water content) • Optical signal • (proportional to droplet size) “RAIN INTENSITY SCALE” “DRD SCALE” Precipitation intensity (opt.) Precipitation intensity (cap.) Scaling Intensity ratio (opt./cap.) Scaling • Intensity ratio < 1.0 -> liquid precipitation • Intensity ratio > 1.0 -> solid (or mixed) precipitation
FD12P Precipitation Type Algorithm • Temperature information is also used to limit some decisions and to detect freezing precipitation • Maximum droplet size and capacitive sensor signal are used to distinguish: • drizzle, ice pellets, different snow types
FD12P Main Parts Capacitive sensor • Transmitter unit FDT12B • Receiver unit FDR12 • Capacitive sensor DRD12 • Temperature sensor DTS14 • Processor board FDP12 • Interface card DRI21 • Regulator unit FDS12 • Power supply FDW13 • Modem DMX21 as an option Transmitter Receiver Controller unit, includes: - processor board - power regulator - power supply - interface card
Optical Configuration: Transmitter Mechanical structure LED intensity feedback signal Power monitoring Constant intensity control Transmitter LED Photo diode Lens Backscatter monitoring photodiode - optical path blocked - lens contamination (back scatter)
Optical Configuration: Receiver Mechanical structure IR filter Receiver photodiode Lens Backscatter monitoring LED - optical path blocked - lens contamination - receiver self-test
Forward Scatter Measurement Receiver photodiode Transmitter LED Transmitter Receiver
OFFSET Measurement Zero scatter signal is measured by delaying transmitter pulses (equals switching off the transmitter) Ambient light Transmitter Receiver Receiver signal level = zero (offset) signal level + noise from ambient light and electrical circuits
Contamination Measurement Transmitter LED Backscatter monitoring LED Backscatter monitoring photodiode Receiver Transmitter
Self-diagnostics • The FD12P checks that all measurement signal levels are within realistic limits • receiver signal and offset levels • number of samples • DRD12 output level • temperature (TS) • In addition the FD12P measures many internal parameters and checks that they are close to their nominal values • A warning or alarm is generated automatically if a value is not within limits • Sensor status message provides a description of the failure
Monitored Parameters • The following internal parameters are measured • FDT12B • transmitter backscatter • -15V supply voltage level (M15) • +15V supply voltage level (P15) • transmitter LED control voltage (LEDI) • timing circuit duty cycle (DUTY) • transmitter ground level - processor board ground (BGND) • FDR12 • receiver backscatter • ambient light level (AMBL) • FDP12 • lens heating current (VH) • stepped-up supply voltage (VBB, approximately 20V) • box temperature (TE, only a backup measurement)
SIGNAL 0.02 OFFSET 129.73 DRIFT -0.02 REC. BACKSCATTER 1313 CHANGE -8 TR. BACKSCATTER 10.2 CHANGE 0.0 TE 24.2 VBB 19.5 VH 0.6 LEDI 5.3 P15 14.7 M15 -14.6 BGND -0.1 AMBL 0.1 DUTY 1.7 DRI21 MEASUREMENTS TS 23.0 DRD INST 900 DRY 900.0 HARDWARE : OK STAtus Message • The output of STA command shows the diagnostics results • An asterisk (*) is shown in front of a parameter if the value is not within limits • after the text “HARDWARE:” there will be a verbal description of the problem • Status can also be polled as output message type 3
Hardware Error Texts BACKSCATTER HIGH - receiver or transmitter contamination signal has changed more than the ALARM limit given in configuration TRANSMITTER ERROR - LEDI signal bigger than 7V or less than -8V ±15 V POWER ERROR - receiver/transmitter power less than 14V or more than 16V OFFSET ERROR - offset frequency is zero (cable disconnected) SIGNAL ERROR - signal frequency less than 50% of the offset frequency RECEIVER ERROR - too low signal in receiver backscatter measurement DATA RAM ERROR - error in RAM read/write check EEPROM ERROR - EEPROM checksum error
Hardware Warning Texts BACKSCATTER INCREASED - receiver or transmitter contamination signal has changed more than the WARNING limit selected in configuration TRANSMITTER INTENSITY LOW - LEDI signal less than -3V RECEIVER SATURATED - AMBL signal less than -9V OFFSET DRIFTED - offset drifted more than ±2.5Hz from the reference, set in the configuration LENS HEATER OFF - no current flowing to lens heaters DRI21 NOT CONNECTED - DRI21 board can not be detected TS SENSOR ERROR - DTS14 measurement off limits DRD12 ERROR - DRD12 analog signal close to zero VISIBILITY NOT CALIBRATED - visibility calibration coefficient has not been changed from the default value
FD12P Maintenance • Periodical maintenance: • cleaning of the optical path, lenses and the DRD12 surfaces (recommended interval 6 months or depending on local conditions) • optical measurement calibration (recommended interval 6 months) • temperature measurement calibration (recommended interval 1 year) • Tools: • optical cleaning cloth and fluid (e.g. isopropanol) • FDA13 (or FDA12) visibility calibrator • ice bath or a calibrated reference thermometer
Cleaning • The hoods and tubes in front of lenses should be cleaned • Lenses should be cleaned carefully • DRD12 sensor elements can be cleaned with the same fluid and cloth as the lenses • After cleaning the STAtus message should be checked • if the backscatter CHANGE values are not close to zero: • try to clean the lenses again • use CLEAN command to set new reference values
Optical Calibration 2. Visibility calibrator • Blocking plate is first used to check the zero signal level • the CHECK command is used to see the (scaled) output frequency • Visibility calibrator is then used to produce a standard scatter signal (high signal value) • the visibility calibrator nominal value has been defined at the factory • if the sensor output frequency is not within 3% of the nominal value, the sensor is calibrated with CAL command (CAL nominal_freq) 1. Blocking plate
Temperature Calibration • The temperature sensor is put in an ice bath (in thermos flask) • zero degrees C reading is verified with FREQ command • reading is updated once per minute • if the reading is not within 0.1 degrees the sensor is calibrated with command TCAL TS 0.0 • Reference thermometer can be used to check the true temperature of the ice bath • other calibration temperatures can also be used (ice bath is not absolutely necessary) Temperature sensor in ice bath
Troubleshooting • The sensor can automatically detect most problems • the sensor indicates a warning or error in the output message • If the sensor has indicated an error, the user should check the STAtus command output (or message type 3) • the status will give a verbal description of the problem • erroneous value is indicated by an asterisk (*) • Chapter 6 in the FD12P User’s Guide contains more troubleshooting instructions • see especially the chapter “Values for internal monitoring” for suggestions of corrective actions